【评测中心】基于MM32SPIN的无感方波驱动应用方案——中小功率水泵

↑ 点击图片或“阅读原文”免费申请 ↑
方案特色:
ARM Cortex-M0高性能电机驱动专用芯片
32K字节闪存、4K字节存储器、72MHz高速运行,并自带除法器、ADC、比较器…等
120/150度无传感方波驱动
电机转速可达100,000rpm (2极电机)
速度命令输入可为模拟电压或PWM信号
FG输出
定转速或恒功率运转
完整的保护机制: 过流保护、堵转保护、过压/欠压保护
水泵专属特点:
空载时,以高转速产生大吸力将水提上来
带载时,以高扭矩满足量程的要求
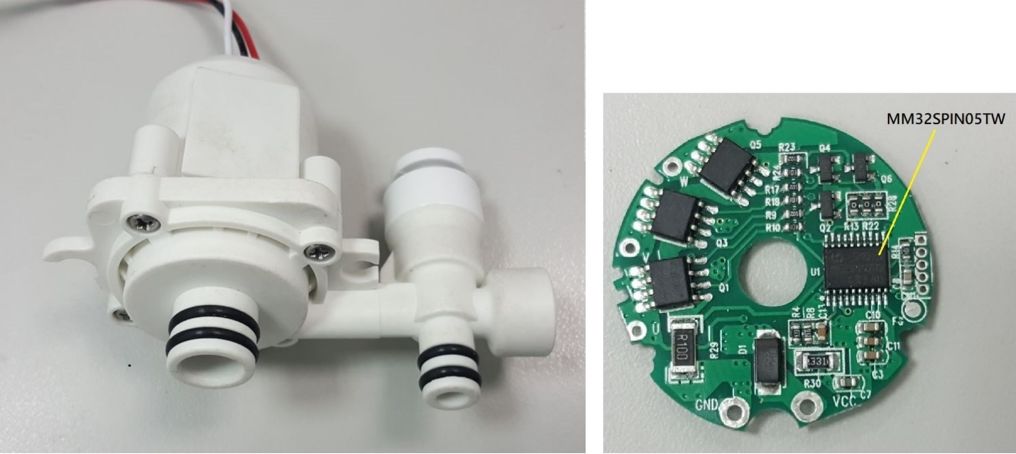
图1. 左图:常见的24V/13W小型水泵;
右图:采用MM32SPIN05TW的驱动板
2. 无传感方波驱动技术原理
在此介绍无传感方波驱动的技术原理与实现方法。
相电压与霍尔信号的对应关系
带传感器(霍尔组件)的方波驱动,MCU可藉由霍尔信号的变化取得转子的位置以正确换相。当无霍尔组件时,该如何取得转子的位置呢?观察下图之带霍尔组件的方波驱动波形,换相点皆位于霍尔状态改变之际,如蓝色虚线所示.同时亦可发现,在霍尔状态维持不变的期间,必有一相"未被驱动"而惯性地转动并呈现发电机状态,如红色指标所示。这段"未被驱动"的期间极为有用,我们将利用它的电压变化来取代霍尔组件的功能。
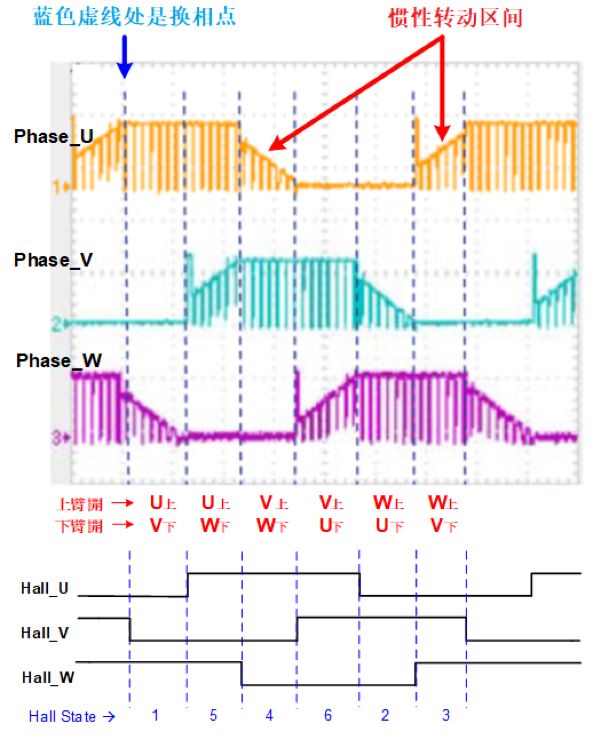
图2. 相电压与霍尔信号的对应关系
过零点侦测取代霍尔信号
本节要教大家如何利用这段"未被驱动"的惯性转动区的电压变化来取代霍尔组件的功能.请参考下图,首先我们定义"Zero-crossing Point(过零点)",如红点所示."过零点"这个名称的由来是:该点位于某相"未被驱动"期间的正中央,相电流在它之前30度(换相前)与它之后30度(换相后)的流向是相反的。因此,若能侦测到该点的位置,则再延迟30度便是下一个换相点,这样就可以取代了霍尔组件的功能了!
再观察下图,过零点所在位置的相电压(PWM信号为High时),约略是DC_bus的1/2,我们可以使用MCU的ADC采样功能来执行这项侦测工作,下一节将说明具体的实现方法.注意:下图ㄇ字型黑框的凹陷或凸起的相电压变化,是因为换相瞬间的电流变化作用于电机的绕组所造成的(V=L*di/dt),必须避开后才可进行过零点侦测。
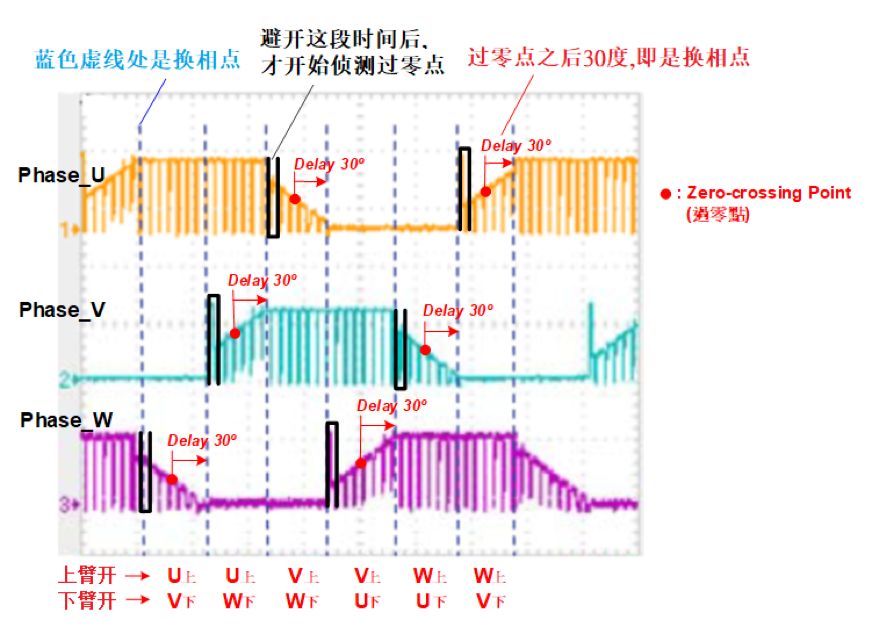
图3. 过零点侦测取代霍尔信号
过零点侦测之实现方式
使用MCU的ADC来侦测过零点之前,必须先对相电压做分压,再经过低通滤波以获得位准低于5V的直流电压.而判断过零点的阈值,则设置为该直流电压幅值的1/2. 随着电机转速与负载的不同,该直流电压的幅值是会改变的.因此,过零点的阈值也随之在调整,这可由MCU实时采样并计算而得.示意图如下:
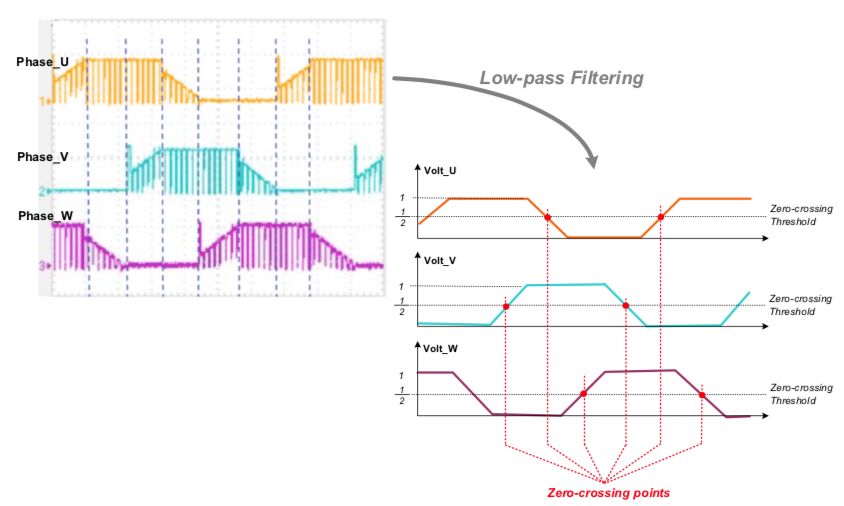
图4. 过零点侦测之实现方式
3. 硬件设计
基于MM32SPIN05TW之无传感方波驱动于"小型水泵"的电机驱动板参考原理图如下:
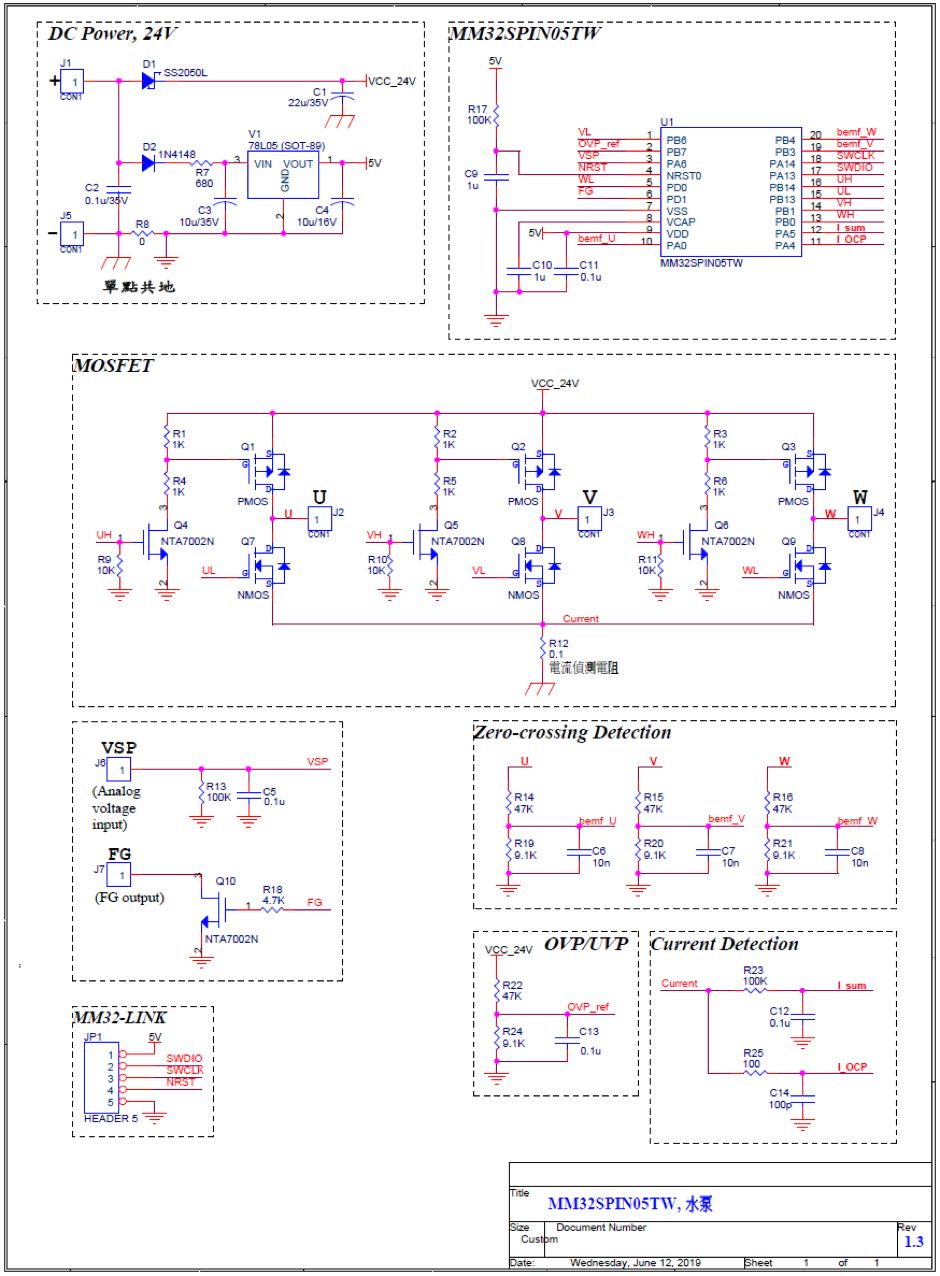
图5. 基于MM32SPIN05的中小功率水泵
电机驱动板原理图
4. 电压波形
本应用案例采用120度方波驱动,在空载和带载时的相电压波形如下: (转速分别是12000rpm和5500rpm)
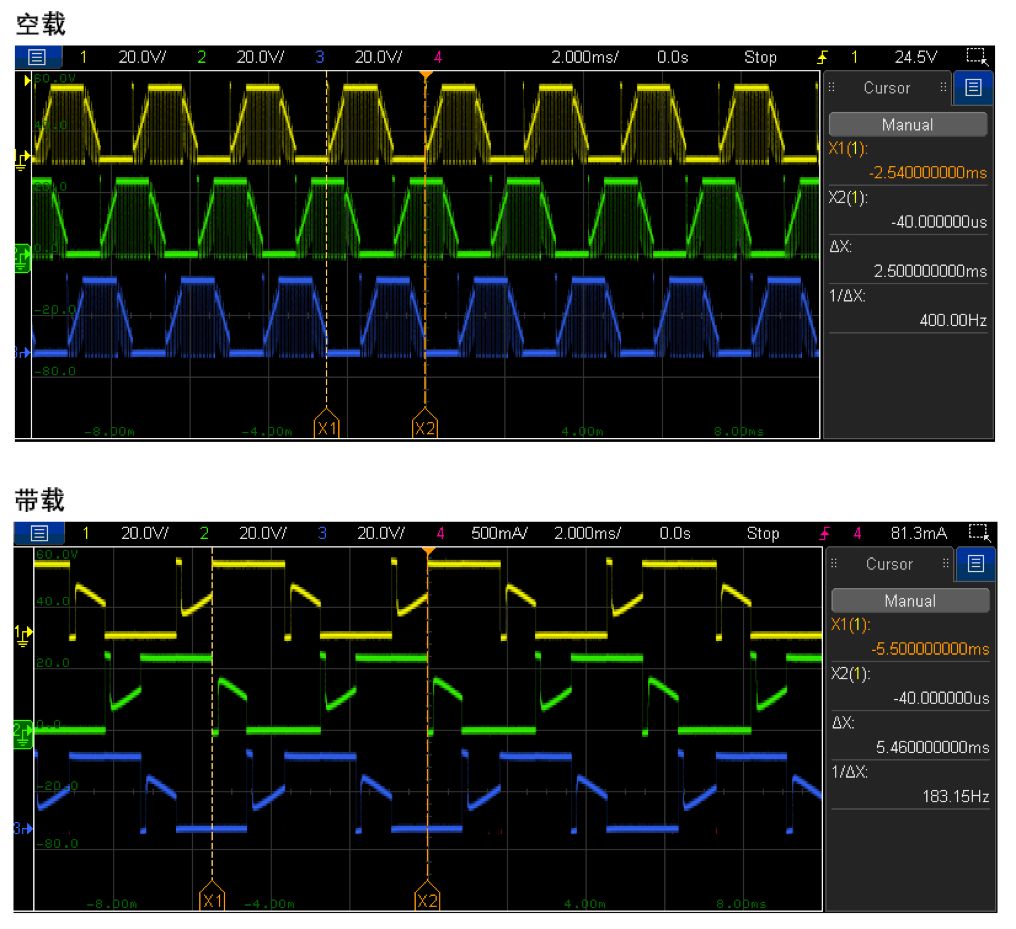
图6. 空载和带载时的相电压波形
5. 结论
MM32SPIN05系列是灵动微电子推出的基本型高性能电机驱动专用芯片,能满足大多数方波/弦波算法的需求.基于MM32SPIN05的各种电机驱动参考方案,请洽灵动微电子销售人员。
点击阅读原文,立即免费申请!
 扫一扫下载订阅号助手,用手机发文章
扫一扫下载订阅号助手,用手机发文章 
朋友会在“发现-看一看”看到你“在看”的内容