经典案例丨南昌航空大学飞控系统实验室建设
01
项目简介

02
面临挑战
无人机飞控系统在专业应用中对无人机的控制稳定性、安全性和易操作性都有很高的要求。目前市面上的无人机相关产品主要集中在实操学习和基本的结构性学习范围内,能够进行控制原理学习及仿真的硬件产品不多,完全开放飞控可进行二次开发的更是少之又少。
学校在进行各类仿真实验时既希望向学生讲述原理性的知识,也希望学生能对实际无人机进行相关的控制实验,但限于无人机对实验室场地及操作安全性要求极高,所以要完成这样的实验室建设十分不易。

03
解决方案
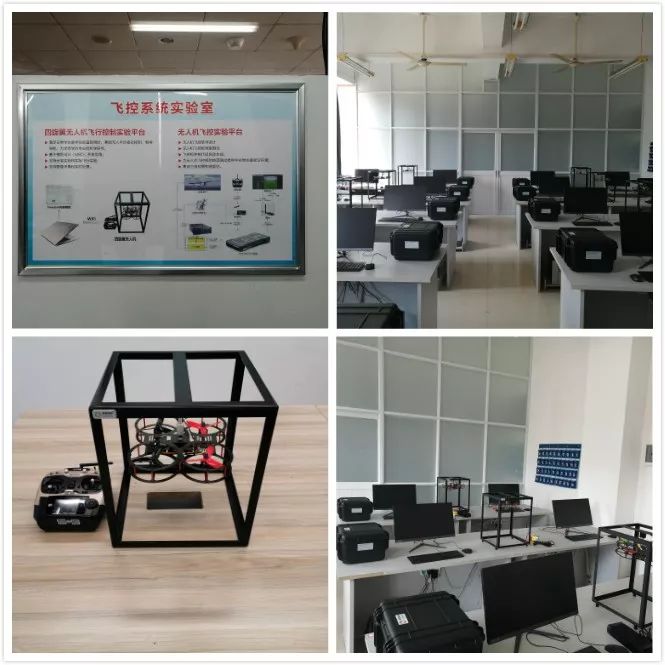
一、四旋翼无人机飞行控制实验平台
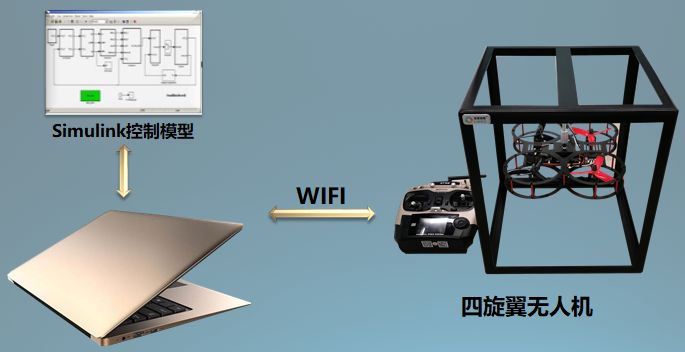
我司提供的四旋翼无人机飞行控制实验系统提供了一个软硬件都完全开放的无人机飞控开发平台,该平台由一台上位机和一套四旋翼无人机台架构成。上位机主要在MATLAB/Simulink上完成无人机模型及控制仿真设计,并通过无线与四旋翼进行信息交互,四旋翼无人机台架主要用于演示验证上位机设计的飞控算法,硬件上还可以进行飞控板及树莓派的嵌入式系统开发。
平台组成如下图所示:
♦单轴姿态控制实验
♦三轴姿态控制实验
♦外部环境扰动实验
♦传感器误差实验
♦单轴姿态控制实验
♦三轴姿态控制实验
♦外部环境扰动实验
♦传感器误差实验
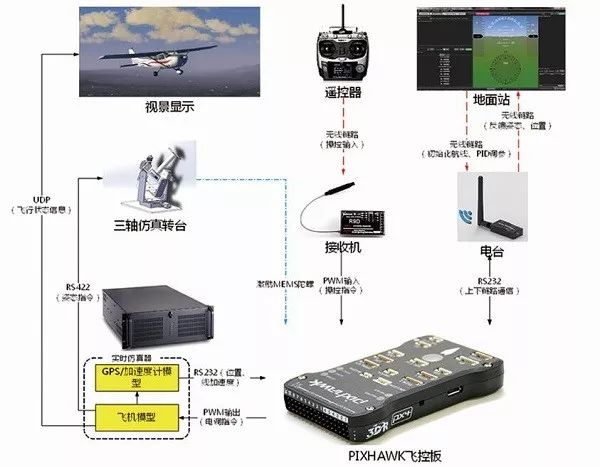
♦多旋翼飞控快速原型
♦固定翼飞控快速原型
♦外部环境扰动半实物实验

04
平台优势
一、四旋翼无人机飞行控制实验平台

05
项目总结
“新工科”背景下,我国现行的工程人才培养模式需要进行较大的调整,而我司与南昌航空大学合作的飞控系统实验室正是从这个角度出发,该实验平台具有极佳的开放性,既能满足现代工程教育的创新实践要求,也能为前沿科研工作的开展提供物质基础。既能培养学生的创新能力,又能提供配套的实验指导书,作为老师的教学资料或参考书,对于新建的无人机专业或实验室教学老师来说是一个很好的选择。


![]()
北京灵思创奇科技有限公司
电话:010-5732 5131 / 5732 5132
传真:010-5732 5130
网址:www.linkstech.com.cn
微信公众号:LINKS-TECH
地址:北京市昌平区北控宏创科技园13#201
