报名请扫描图中二维码
本资料编译自伟世通CTO兼高级副总裁Markus Schupfner2019年11月的演讲材料。

伟世通产品组合包括:仪表板,平视显示器,座舱电脑(控制器),信息娱乐系统,显示系统,联网系统,自动驾驶系统等。根据第三方机构研究,伟世通目前是排名前五的智能联网汽车一级供应商,数字仪表第一名,中控显示第二名。 座舱电子的发展历程如下:2008专有嵌入式信息娱乐系统→2011全数字仪表→2015苹果CarPlay和Android Auto→2018座舱域控制器→2020本地化Android信息娱乐系统→2021多显示模块+ADAS L2 +HMI→2022自适应座舱。座舱安全的发展历程如下:2009自动紧急制动→2014车道保持辅助→2017单车道高速辅助→2018公路驾驶辅助与换道→2020 E-NCAP+REM+VRUs→2021适用于L2 Hands-Off的WP29标准→2022适用于L2Hands-Off的联合国标准。

•电动汽车和安全驱动的仪表数字化
•CarPlay和Android Auto赢得信息娱乐之战
•从分散式ECU到集中式座舱域控制器
•带ADASHMI的多显示器数字座舱
•自适应座舱融合车内监控和ADAS环境
座舱安全的主要发展趋势:
•更加关注改进L2级ADAS (指L2+)
•需要传感器融合,并提高算力
•仅在美国和日本允许L2级脱手驾驶
•联合国WP29工作组正在制定新规范
•预计2022年联合国有关脱手驾驶的规范将增加ADAS/AD控制器的需求
座舱域控制器的基本要求是:多显示器,集中计算,可扩展性,多核。而自动驾驶域控制器的基本要求是:集中式传感器融合,可扩展的GPU功能,抽象和安全,开放。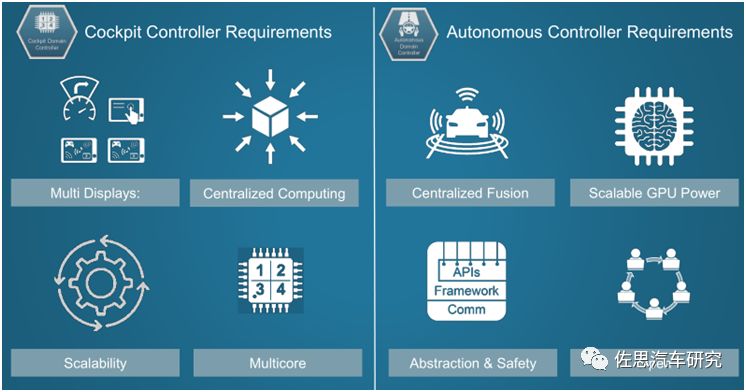

伟世通分别推出了座舱域控制器和自动驾驶域控制器。其中座舱域控制器叫SmartCore,是服务于多个显示器和多应用程序的安全集中式计算平台,让座舱具有更高的性价比,提供从入门级到高级功能的可扩展性,提供快速集成的中间件和工具。伟世通自动驾驶域控制器叫Drivercore,带三大模块:Compute、Runtime和Studio。Compute具备从2 TFLOPS到20 TFLOPS的算力,提供失效安全和信息安全的模块化设计;Runtime提供安全的通讯,并易于集成到车辆;Studio提供开放的研发生态系统。
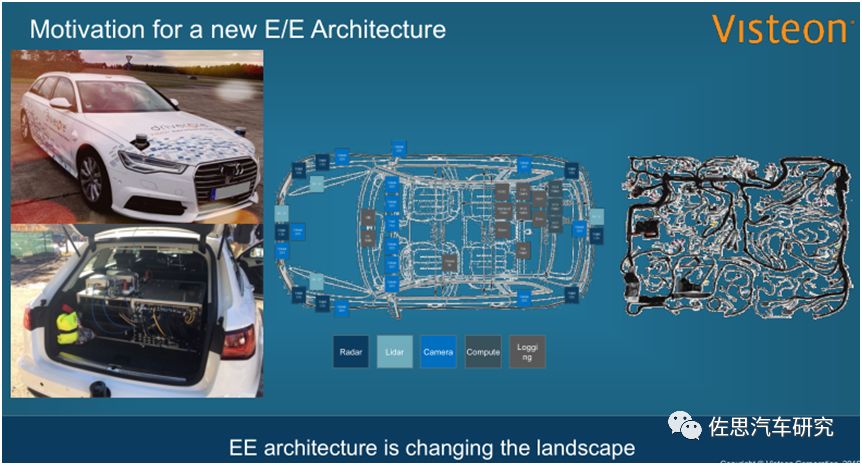
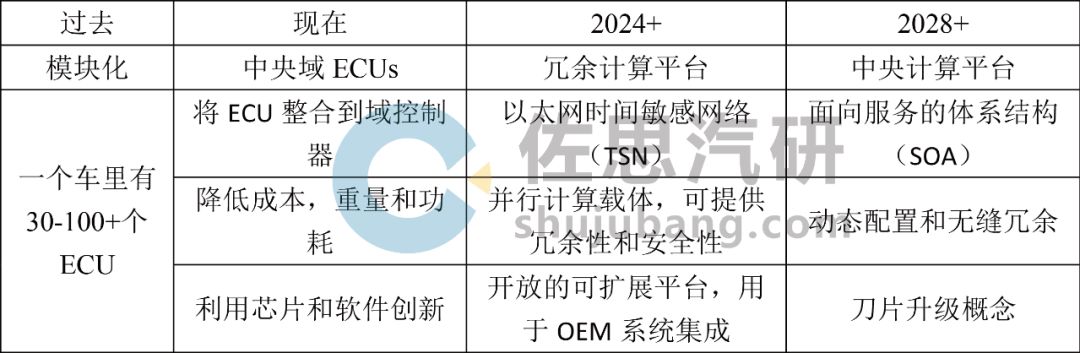
EE架构的变革正在改变整车布局。为什么需要新的电子电气架构?主要是由于行业发展的挑战和汽车新技术的进步。尤其是汽车以太网TSN改变了未来的电子电气架构。
行业发展的挑战有:
•ECU数量大幅增加(超过100个)
•需要更多的传感器/执行器/计算力
•硬件/软件分离:生态开发合作伙伴的集成
•车辆线束重量和生产成本的增加(最长5千米,>50千克,生产时间超过1000小时)
•故障安全,容错操作,信息安全
•云端/边缘侧的无缝连接和升级
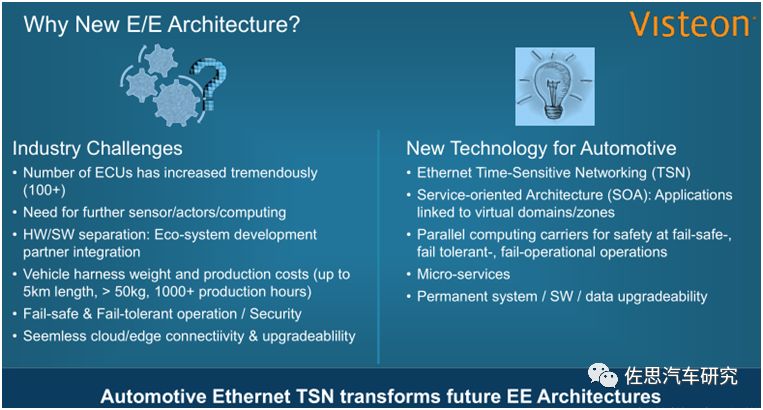
汽车新技术的发展包括:
•以太网时间敏感网络(TSN)
•面向服务的体系结构(SOA):应用连接到虚拟域/区域
•并行计算承载,确保失效安全,容错操作和失效可操作
•微服务
•永久系统/软件/数据可升级性
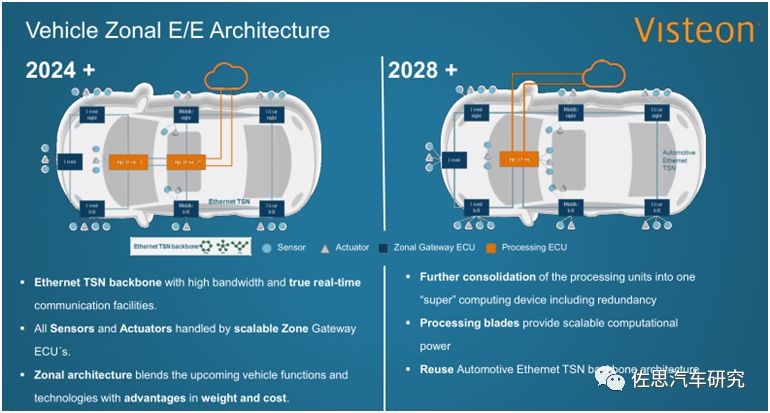
目前,汽车内部的网络设施主要是基于域的架构。针对每个关键功能都有不同的域:一个域用于车身控制,一个域用于信息娱乐,一个域用于远程信息处理,一个域用于动力总成等等。通常情况下,不同的域使用不同网络协议的组合(如CAN、LIN、FlexRay等协议)。随着网络复杂性的不断提高,这种不同的域使用不同协议的方法效率越来越低。因此,在未来几年中,将需要从目前基于域的体系架构转向区域(Zonal)体系架构。伟世通预计,2024年以后的汽车区域体系架构特点有:
•具有高带宽和真正实时通信功能的以太TSN主干网
•所有传感器和执行器均由可扩展的区域网关ECU处理
•区域体系架构将融合车辆新功能新技术和重量成本优势
2028年以后的区域体系架构特点有:
•进一步将处理单元整合到一个“超级”计算设备中,包括冗余
•处理器刀片提供可扩展的计算能力
•重用汽车以太TSN主干架构
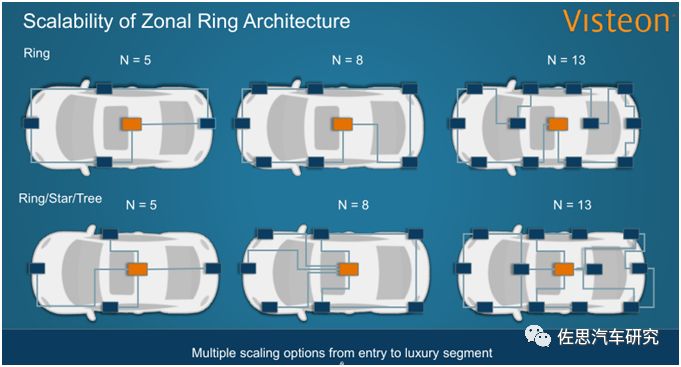
区域体系架构的提供良好的可扩展性,包括从入门到豪华车型的多种扩展选择。
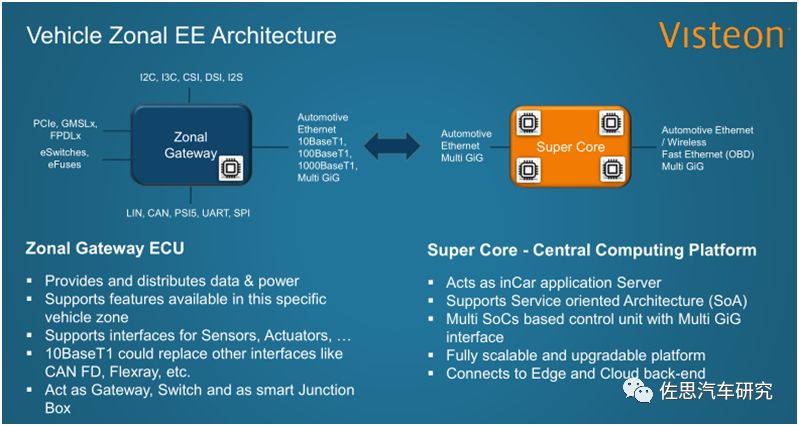
区域体系架构包括两个核心设备:区域网关ECU和Super Core (中央计算平台)。区域网关ECU提供和分发数据及电力,支持车辆特定区域的功能;支持传感器、执行器等接口;以10BaseT1以太网替换其他网络协议如CAN FD、Flexray等;充当网关、交换机和智能接线盒。Super Core (中央计算平台)则充当车内应用服务器,是一个具有多GiG接口,采用多个SoC的控制单元。Super Core支持面向服务的体系结构(SoA),是一个完全可扩展和可升级的平台,可连接到边缘服务器和云端服务器。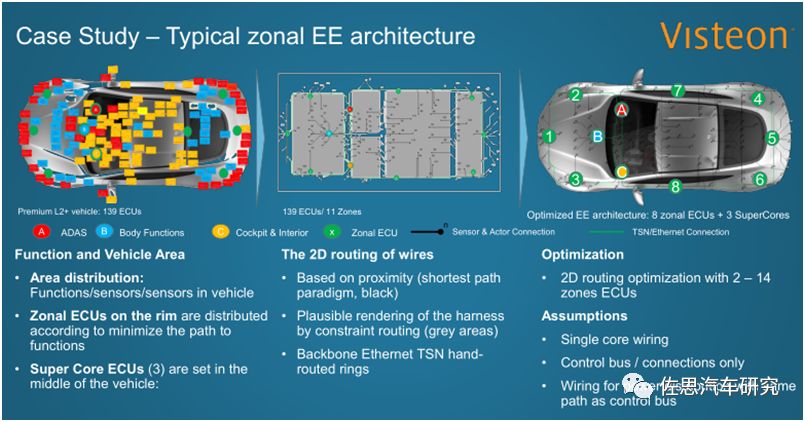
上图是一个典型的区域体系架构案例。在一辆L2+车辆上,将139个ECU分配到11个区域,分别连接到8个区域ECU+3个Super Core。车辆边缘的区域ECU是为了最大限度地减少功能实现路径,三个SuperCore ECU则设置在车辆中间。
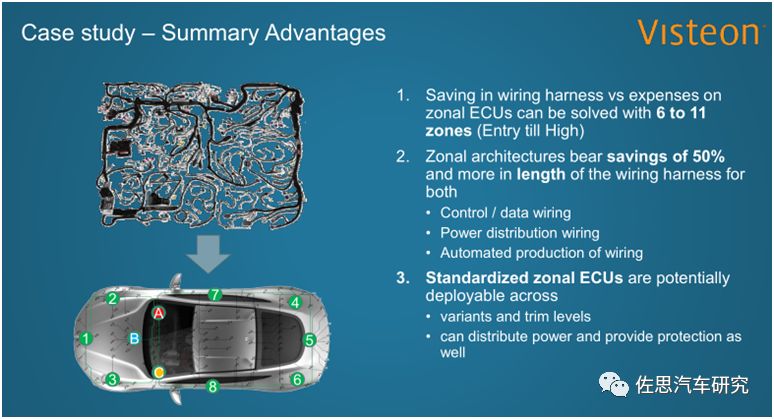
本案例的优点包括:
2.区域体系架构可节省50%以上的线束长度,既节省了控制/数据线束,也节省了电力线束,还减少了线束的生产时间;3.标准化的区域ECU部署可以通过变化调整,适当增减实现灵活部署,还可以分配电力并提供保护。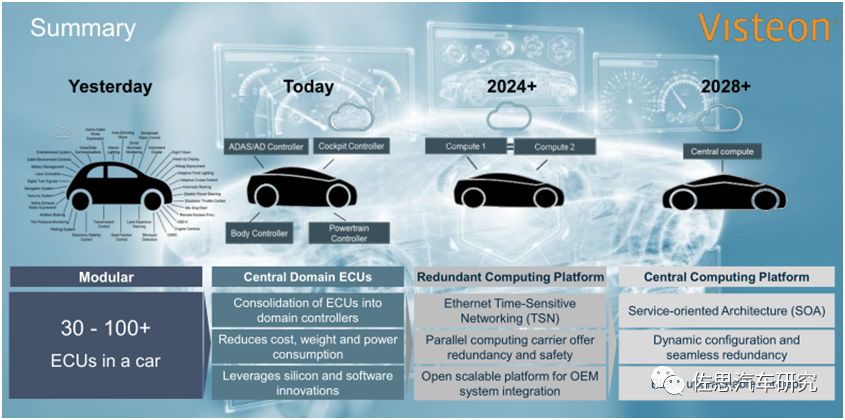
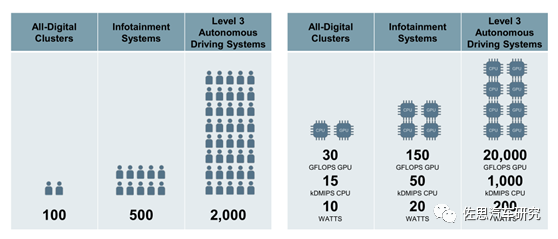
展望未来,L3自动驾驶系统大概需要20000 GFLOPS的GPU,1000kDMIPS的CPU,以及200w的功耗。
【近期文章】
智能座舱平台研究:硬件平台功能越聚越多,软件平台成为布局重点
佐思汽研2020年多用户报告撰写计划表
《周彦武研究特辑:智能驾驶硬件指南》
「佐思研究年报及季报」
主机厂自动驾驶策略研究 | 汽车视觉产业研究 | 低速自动驾驶产业研究 | 商用车自动驾驶产业研究 | 新兴造车企业布局及智能网联功能对比分析 | 汽车MLCC研究报告 | 汽车分时租赁研究报告 | 5G自动驾驶专题研究 | 汽车仿真研究 | 高精度地图产业研究 | 域控制器研究 | 自动泊车与自主泊车研究 | 激光雷达研究 | 毫米波雷达研究 | 处理器和计算机芯片研究 | 红外技术及在夜视和DMS研究 | 中国毫米波雷达市场分析 | 汽车功率半导体研究 | HUD行业研究与供应商竞争力分析报告 | ADAS与自动驾驶Tier1研究 | 商用车自动驾驶研究 | 乘用车摄像头季报 | 自主车厂车联网产品分析 | T-Box市场研究报告 | 汽车网关产业研究 | 乘用车摄像头季报Q2 | 丰田汽车新四化布局 | 宝马集团新四化布局和战略研究 | 全球及中国车载语音行业 | 中国及全球汽车线束、连接器与线缆研究 | 戴姆勒新四化布局和战略研究 | 日产新四化研究 | 本田新四化研究 | 吉利新四化研究 | 大众集团新四化布局和战略研究 I 汽车智能座舱研究 | 人机交互研究
「佐思研究月报」
车联网月报 | ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报
联系人: 廖棪 13718845418(同微信) 佐思汽研 18600021096(同微信)
