北航和哈佛研发仿章鱼触手软体机器人,通过“缠绕+吸附”抓住各类物体!
章鱼作为软体动物的典型代表而受到研究人员的广泛关注。其触手多自由度运动+数以百计吸盘的奇特结构赋予其无与伦比的水下复杂精密操作能力,能快速捕捉小至螃蟹,大到鲨鱼。研究人员发现不同种类的章鱼有着不同大小的触手锥度角,锥度角较大的触手能提供更大的缠绕力;而锥度角较小的触手使得章鱼可以在狭窄的受限环境下进行自如的操作,鲜有研究针对锥度角这一生物特征,对章鱼触手的“缠绕+吸附”功能进行研究。

图1 章鱼触手主要功能分解:缠绕+吸附
2月26日,北京航空航天大学文力教授与哈佛大学Katia Bertoldi教授合作团队在国际期刊《Soft Robotics》发表了最新的研究成果“OctopusArm-Inspired Tapered Soft Actuators with Suckers for Improved Grasping”。该研究根据生物章鱼触手具有不同锥度的特点,通过数据统计,仿生设计并制造了集“缠绕+吸附”于一体的章鱼触手(Tentacle Bot),实现了对不同大小、材质,以及狭窄空间环境下物体的有效抓持。北京航空航天大学为该研究的第一单位、第一通讯单位。
该研究涉及到包括生物、机器人、力学等多个研究领域交叉。北航机械学院的博士生谢哲新、哈佛大学博士生August Domel为该文的共同第一作者。机械学院硕士毕业生龚哲元参与机器人的制造及实验,Festo公司的Elias Knubben参与软体机器人的设计,哈佛大学An Ning, Connor Green参与了机器人的仿真,哈佛大学JamesWeaver,北京航空航天大学王田苗教授参与了项目论证与讨论。文力教授与Katia Bertoldi教授为该项目共同通讯作者。
课题组首先探索了自然界大量的生物章鱼触手的形态学特征,并从中提取“锥度角”这一几何参量,发现自然界的章鱼触手的锥度分布在3度至13.5度。

图2 自然界种不同种类章鱼的触手锥度角
为了探索锥度角对软体机器人的影响,课题组利用有限元仿真工具对具有不同锥度角的锥形软体机器人进行了分析。在不同锥度角下,机器人在弯曲曲率以及弯曲作用力层面上具有不同的变化情况,课题组发现,小锥度角会带来大的弯曲曲率以及小的弯曲作用力,相反,大锥度角将带来小的弯曲曲率和大的弯曲作用力。一个完美的锥度角,可以实现对不同大小、重量物体的抓取。
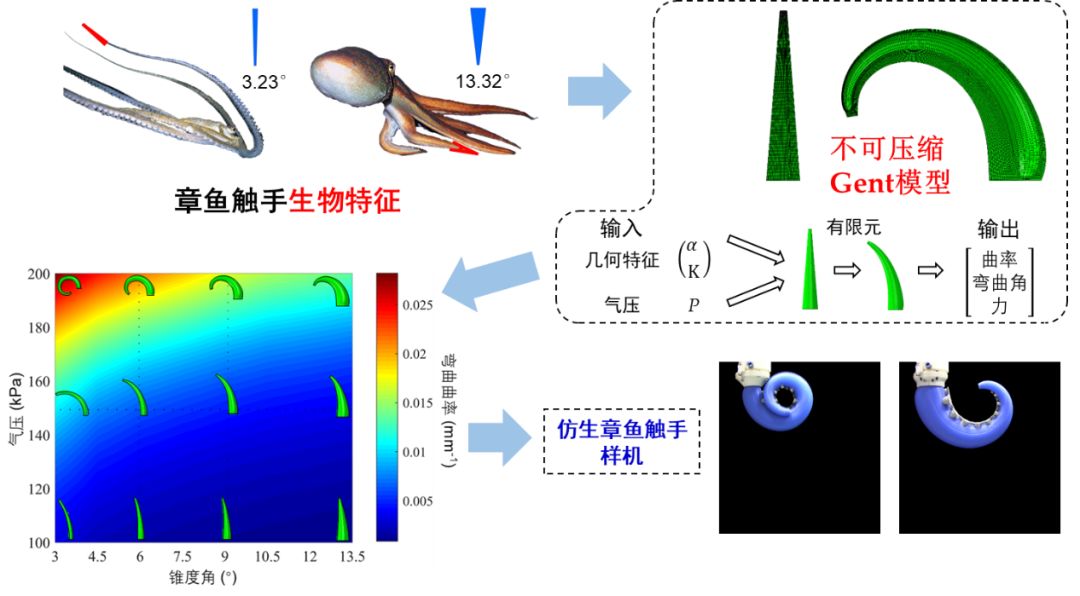
图3 利用有限元仿真工具实现:生物→仿生机器人
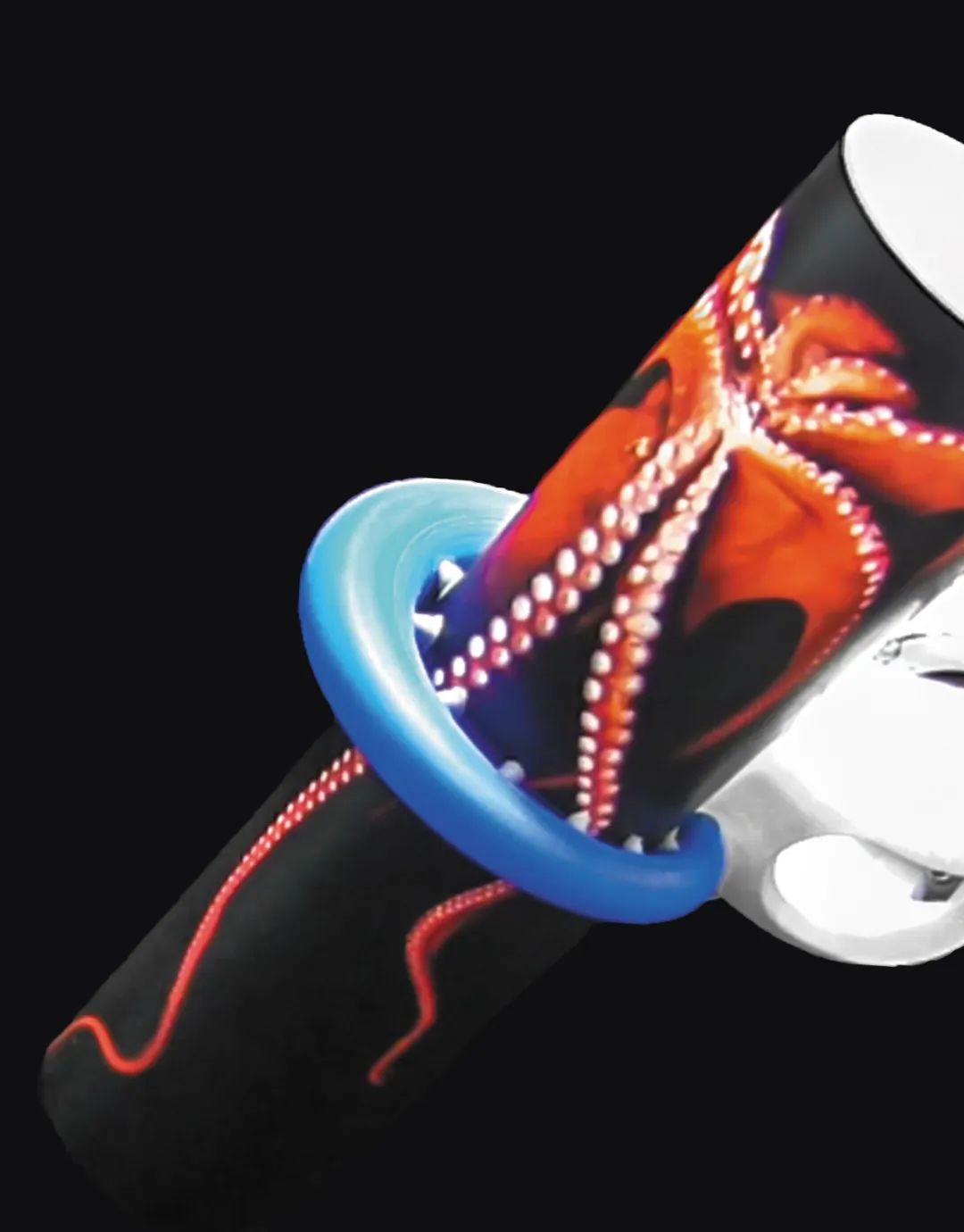
进一步地,研究团队模拟章鱼吸盘的结构及分布方式将锥形软体机器人与软体吸盘相结合,制造出集缠绕和吸附功能于一体的仿生章鱼触手机器人,锥形结构与吸盘分别通过正压与负压发生器进行控制。研究团队对机器人的吸附性能进行了探究。课题组发现,锥度角同时对机器人的吸附功能有着重要的影响,相比于传统的圆柱形机器人,锥形机器人不但能提供更大的最大吸附力,在吸盘剥离过程中由于自身的柔性,也能提供更长时间的吸附,不至于快速脱落。仿生章鱼触手机器人能实现对不同粗糙度平面的吸附。另外,通过结合弯曲功能,机器人能调节弯曲角度实现对曲面的贴合吸附功能,进一步扩大了可吸附物体的范围。
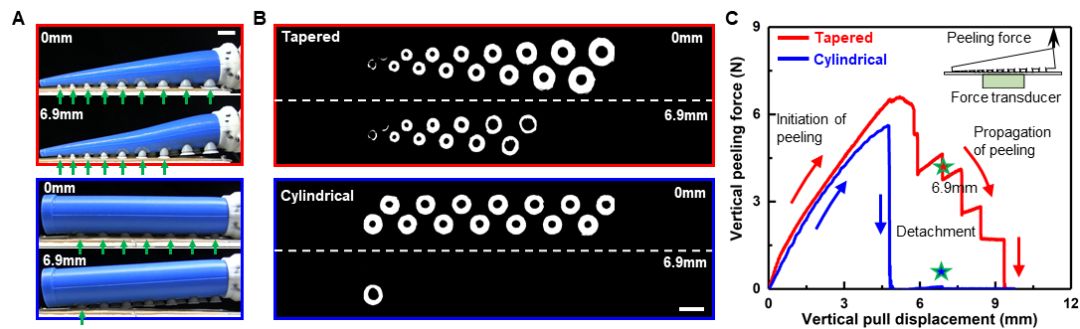
图4:仿生章鱼触手机器人吸附性能测试
章鱼锥度软体驱动器 vs. 传统圆柱软体驱动器吸附性能
结合了缠绕与吸附两种抓取方式使得机器人能够更为快捷、方便地抓取各种大小、材质、重量的物体,小至直径20mm的试管,鸡蛋,大到直径750mm的瑜伽球,机器人都能快速稳定地抓起。
此外,与机械臂相结合,机器人能实现半自主的“吸附-缠绕-传递-交付”动作,为工业使用提供了可能性。机器人锥状的外形更是赋予其穿过狭窄的洞口取出内部物体等类似生物章鱼触手的能力。这项研究工作提出的结合缠绕+吸附的抓持方式,为软体机器人提供了新的设计思路,并将对章鱼触手生物力学机理意义提供新的理解。
Credit: Wyss institute/Harvard
该项目得到了国家自然科学基金优青项目,重点项目,共融机器人重大研发计划,Festo横向课题等项目的支持。
论文链接:
https://www.liebertpub.com/doi/10.1089/soro.2019.0082
END


黑科技社微信号:heikejishe
↙点击【阅读原文】,认领更多全球黑科技产品