详解苹果新iPad Pro的激光雷达及参数
以下文章来源于大话成像 ,作者Zhang Eric
希望通过这个公众号传播我们所掌握的有关成像技术软件、硬件、算法等方面的知识,分享我们在成像领域,尤其是手机成像领域所拥有的一些知识和开发经验。以期集合众智互有裨补,让在这个领域工作的朋友能够彼此交流共同提高。
苹果最新的Ipad pro上使用的新的激光雷达到底是什么?和车载常说的雷达有什么区别?和之前的3D TOF又有什么区别呢?
首先这些雷达的使用的都是TOF技术,也就是time of fly通过测量光飞回的时间计算距离。不过这次的雷达和之前的车载雷达从外观和形式上并不一样。反而和之前手机上使用在前摄的3D Tof一样使用的平面3D TOF。但是TOF算法和sensor原理上和车载雷达一样使用的Dtof技术,而不是手机上3D TOF常见的Itof技术。
下面本文分析苹果新的激光雷达和之前的手机3D TOF还有车载雷达有什么区别,有什么技术突破。首先三者的结构实现和算法原理的区别可以参考下表:

从物理结构上的区别
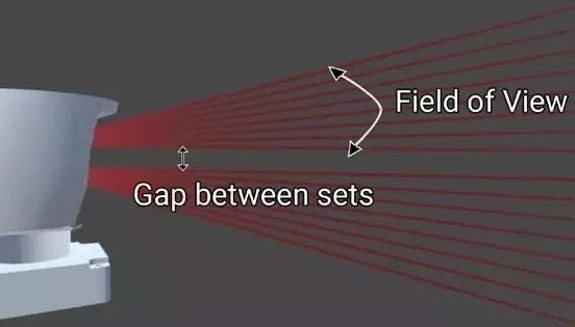
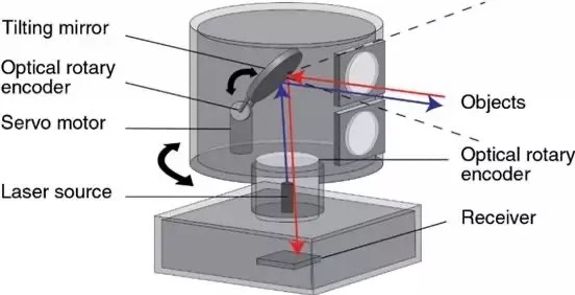
目前车载激光雷达,多是利用旋转的线性扫描,有单线程或者多线程的。如下面两张图第一张图是车载雷达单次扫描的示意,只能扫描一些线。比如64线程雷达单次只能获得64个点的深度.然后如第二张图的结构上面部分进行旋转,每旋转一定角度进行一次扫描,转一圈得到360度的一帧3D图像。这样的物理结构导致车载雷达的帧率和价格一直不理想。Velodyne的64线程的激光雷达价格高达8W美金,这也从一定程度上也限制了使用激光雷达的自动驾驶的发展。
而苹果这次的雷达其实和之前使用3D TOF则更为类似。在不讨论sensor pixel和算法的原理上,他们都是通过一个发射器和一个接收器。而唯一不同的是之前的3D TOF都是使用Itof技术。苹果这次使用的是Dtof技术。所以苹果使用激光雷达的名字,个人觉得更多的是博眼球的一种宣传策略。
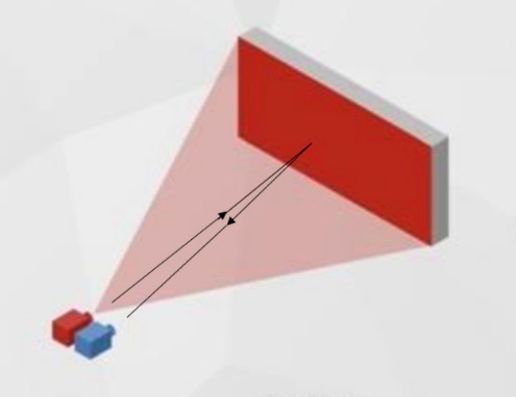
3D TOF成像
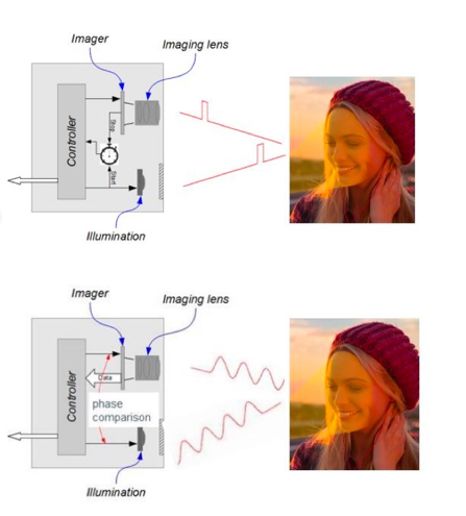
Itof和Dtof的区别
Itof和Dtof的区别,首先从发出信号来看,Dtof是单个脉冲,Itof多是正弦波。
Itof和Dtof的区别
Itof和Dof在sensor和算法上的也有不小的区别。Itof目前更多是使用global shutter sensor 或者是在这个基础上改进的专用sensor。以原始的global shutter sensor 为例,最终的算法是使用基于正弦波的相位计算,一般需要使用四帧图像才能通过相位得到距离,而这导致了sensor不得不工作在4倍于3D成像的帧率,比如3D成像需要30fps,sensor就不得不工作在120fps。这导致了系统功耗的增加和帧率提升的困难。
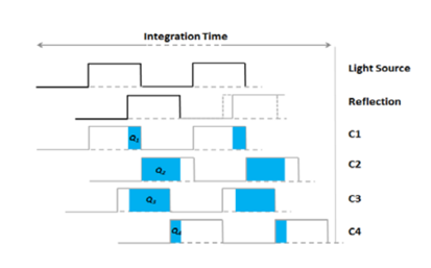
Itof的计算原理
而目前的Dtof则可以过雪崩二极管摆脱传统脉冲tof计算需要使用两帧基于global shutter sensor图像的束缚。SPAD的像素(SiPM)可以直接输出脉冲信号。通过像素的脉冲输出直接进行简单的模数转换就可以得到光子回来的时间和个数,这大大增大了侦测距离,减少了功耗和运算量。
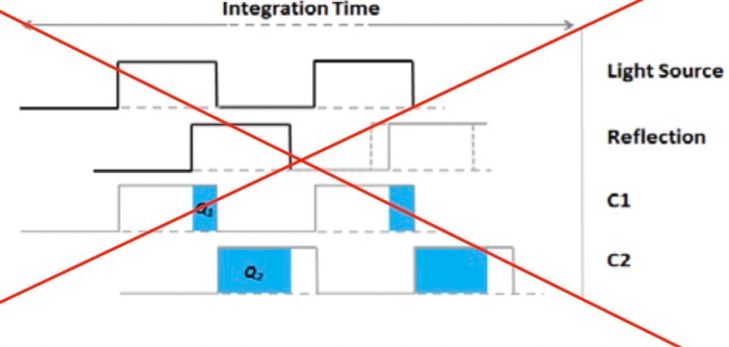
传统脉冲TOF的计算原理
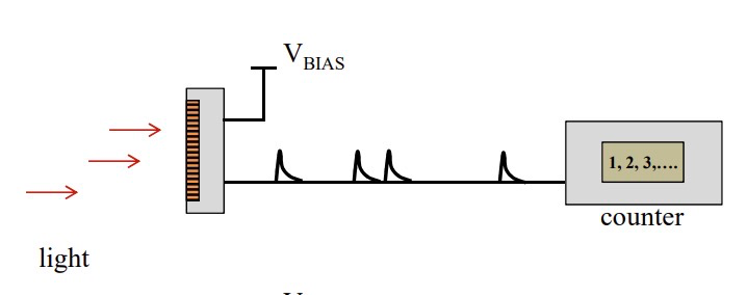
SPAD的简化Singal Chain
(该图缺少转换的TDC的器件,只做示意,今后会更详细的介绍SPAD技术)
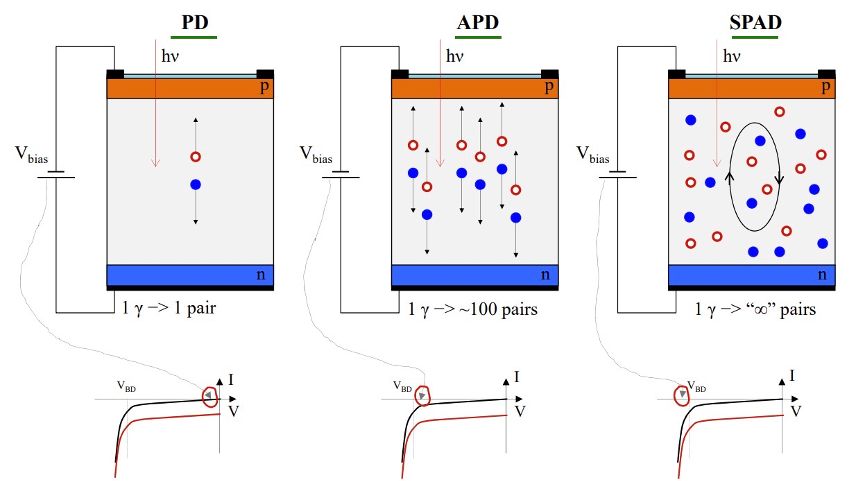
雪崩二极管
雪崩二极管是DTOF的关键。下图左起第一个是一般成像使用的PD(光电二极管),第二是APD(雪崩二极管),第三个是SPAD(单光子雪崩二极管),其主要差别APD和SPAD在通过增加偏置电压,在光子到光电二极管的时候会产生雪崩效应,就是产生大量的电子.这对成像不利,但是对于检测脉冲则很好.而SPAD比PAD更敏感,也就是只需要很少的光子就能产生雪崩效应。
其实Dtof并不是第一次在消费类设备上使用.最早在手机上是在后摄的激光对焦和苹果Face id的测距使用的Dtof sensor。之前的限制主要是来自于SPAD的难以小型化导致sensor的的分辨率很难提高。而这次苹果的激光雷达在这个上面是有所突破的,分辨率比之前设备上的Dtof都要高。
苹果激光雷达参数的估计:
由于目前苹果还没有公布具体的参数,下面参数是本公众号不负责任的估计。待正式产品参数出现后我们会进一步更新。
苹果公司有两家成像sensor的供应商都有能力实现SPAD的sensor :Sony和ST。从目前已知的外网消息,这颗sensor应该是Sony的产品。根据现在SPAD技术的发展,和之前苹果3Dface id 的分辨率,以及从目前得到产品外观中镜头面积来估计苹果这次的激光雷达分辨率应该能达到QVGA~VGA之间,最低也不会小于QQVGA。单个pixel的size应该在10um到15um之间。从理论上Dtof能到100m~300M的侦测距离,考虑到平板的使用场景和功耗的追求,这次的激光雷达应该可以达到5~10米左右的距离,是大于之前手机上Itof 3米左右的有效距离。
前景展望
ITOF 和DTOF 比较
下表是Itof和Dtof的优缺点比较,从表中可以看到,Dtof的优势还是很明显的,关键参数上只有分辨率略差,不过这次苹果的使用的sensor上突破可能扭转这个局面。

另外DTOF在实际工程化中需要的校准项也要比Itof少,实际生产的难度更低。价格比起车载雷达来说也更便宜,使用多个3D tof也可以满足自动驾驶的需求。个人认为苹果使用的这种3D Dtof在各种场景中会更有优势,发展前途也更大。
来源:大话成像
马来西亚“封国”,菲律宾“封岛”!对半导体产业链影响到底有多大?
传紫光展锐将获大基金22.5亿元投资!目前估值已达630亿元
2019年欧洲专利申请量排行榜:华为排名第一,中兴意外消失!
美国重压之下,华为的换“芯”之路!
硬件成本528.5美元!三星S20 Ultra拆解:韩版自研芯片占比过半!
行业交流、合作请加微信:icsmart01
芯智讯官方交流群:221807116