解决方案 | 激光噪点影响产品输出又难以避免,如何去除“没用”的噪点

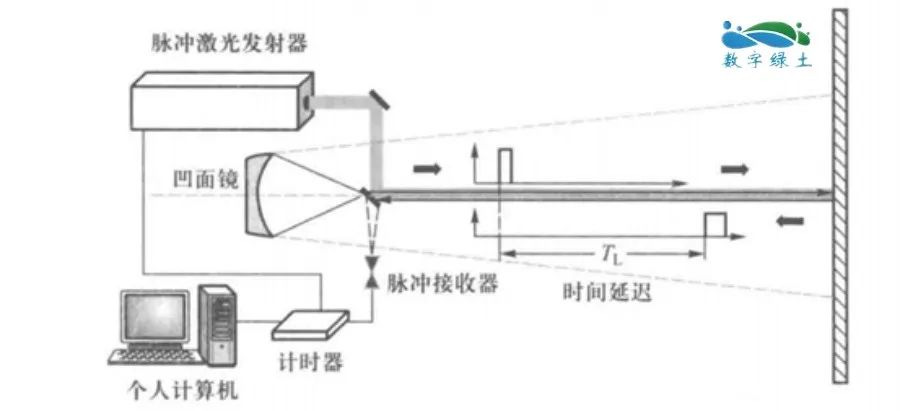
近年来,激光雷达(LiDAR)技术迅猛发展,在测绘、林业调查、气象、考古、无人驾驶和智能机器人等领域均有广泛应用。激光雷达实际上是多种传感器的组合,大致包括发射系统、接收系统及信息处理三部分,它犹如人类的眼睛,可以确定物体的位置、大小等,通常被用于获取精确的位置信息。通过主动向目标探测物发送探测信号(激光束),并将目标发射回来的信号(目标回波)与发射信号进行比较,加以适当处理后便可获取目标的相关信息(图1),如目标距离、方位、高度、速度、姿态、甚至形状等参数,进而对目标进行探测、跟踪和识别。LiDAR与普通微波雷达相比体积更小、质量更轻,另外还有分辨率高,抗干扰能力强,不受光线影响可全天候作业等优点。
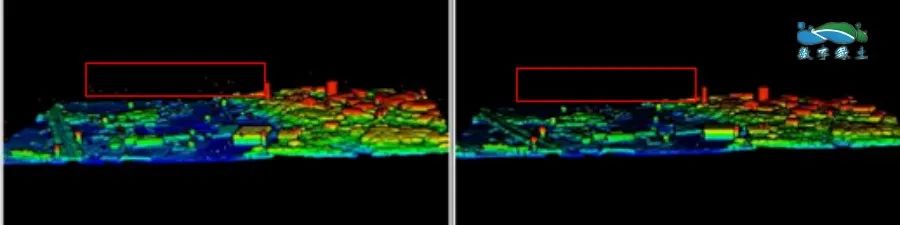
由于周围环境或者扫描仪本身特性,激光束在数据获取过程中有时会产生异常点,即我们常说的噪声点。常见的噪声点包括高位粗差和低位粗差(图2)。高位粗差通常是因为机载LiDAR系统在采集数据的过程中受到低飞的飞行物(比如鸟类或者飞机)的影响,误将这些物体反射回来的信号当作被测目标的反射信号记录下来所产生的;低位粗差则是由于测量过程中的多路径误差或者激光测距仪的误差导致产生的极低点。

图2:高位粗差(左),低位粗差(右)
在数据处理之前去除噪声能够更好地还原地物真实形状,提高后续数据处理的精度。因此,想要利用点云数据生产高精度产品,点云去噪变得尤为重要。一般来说,噪声点实际上就是离群点或离群点云,如果不去除噪声点,噪声点云将会参与运算,导致计算结果精度下降。举例来说,在分离地面点生成高精度DEM的过程中,得到原始点云后需采用滤波进行去噪,采用克里金插值或者反距离权重插值法将去噪后的数据生成相应的高精度DEM,但如果有噪声点存在且被识别为地面点之后,DEM的精度就会下降。

关于数字绿土
公司自主研发了机载、无人机、车载、背包等多平台激光雷达扫描系统,以及点云、影像和电力巡线后处理软件——LiDAR360、LiMapper和LiPowerline, 致力于为电力、农林、测绘以及高精度地图等行业用户提供软硬件一站式激光雷达解决方案。
电子邮箱:info@lidar360.com
联系方式:
张女士:400-808-5501(事务咨询)
牟女士:400-808-2201(产品咨询)
公司地址:北京市海淀区东北旺北京中关村软件园孵化器2号楼2A2308

更多产品详情请关注公司官网
“www.lidar360.com”或拨打“400-808-2201”
喜欢请右边点击“在看”给我一朵小花花