随着科技的发展,定位技术已经成为我们生活中离不开的重要技术。之前我们介绍了以北斗为例的卫星在天上如何帮助我们定位,不过不同应用场景对定位精度的要求也不尽相同。之前文章我们也向小伙伴们介绍过卫星定位原理以及四维图新旗下六分科技的网络RTK技术,而同时在四维图新基础技术研究院还针对在卫星信号弱的场景下,依靠智能算法与高精度地图的融合实现的高精度定位的解决方案,这样就可以实现全场景化的高精度定位(厘米级),本文则通过介绍我们基础技术研究院小伙伴部分技术方案及成果,让大家对自动驾驶车辆部分定位方案有所了解。
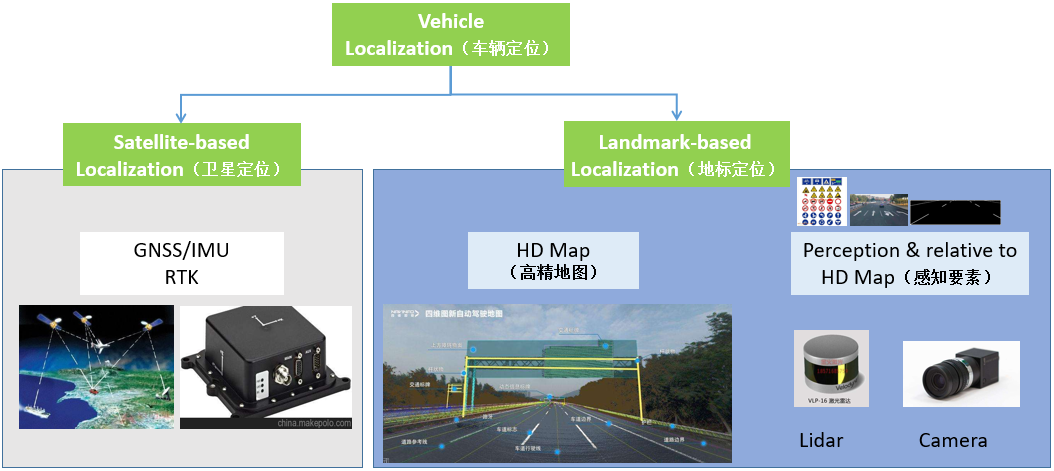
所谓车辆定位,就是解决车辆在哪的问题,而自动驾驶中车辆定位一般分为卫星定位和地标定位两种。卫星定位技术包括GNSS(全球导航卫星系统定位)、IMU(惯性测量单元)、RTK等传统较成熟的定位方案,我们之前为大家介绍的定位技术主要集中在这个方面。(可在文章末尾查看往期内容)地标定位技术包括HD Map、Lidar、视觉Camera等技术,Lidar和视觉Camera不仅自身拥有定位方案,而且能够为HD Map提供感知要素。地标定位通常能解决卫星定位在隧道、楼宇和林荫小道等接收不到信号的问题,是自动驾驶车辆定位必须具备的能力。地标定位技术是目前自动驾驶中主流的解决方案的重要组成,往往一种或多种技术方案组合使用,结合卫星定位,能够做到针对不同路况的定位要求拥有不同优势的定位方案。基于主流的自动驾驶地标定位方案,四维图新基础技术研究院深度学习研发部相关技术上进行了长期深入的探索积累,并在单目视觉定位,视觉SLAM定位以及激光雷达定位三个方向形成了成熟的解决方案。其中在集团自主研发的自动驾驶研发部的自动代客泊车(AVP)项目中,本着低成本、高精度定位的原则,视觉SLAM及激光雷达定位均发挥了极大作用。除此之外,定位方案中也可融合HD Map的车位要素图层和车道线要素图层来提升入库的泊入泊车成功率和定位精度,为集团高精地图赋能。下面就结合我们研究院在几个主流技术方面具体的研究成果,以此讲讲不同定位方案的特点:单目视觉定位是指用单目摄像头对所采集的2D信息,结合HD Map的关键点信息,通过智能算法得出的定位方案。通常采用廉价视觉camera与HD Map相结合,形成了一套 的定位方案。针对此方案,我们以G7路段为测试对象,并根据视觉Camera图像中车道线及标志牌等2D关键点信息和HD Map中对应标志物的3D关键点信息进行组合运算获取车辆预测定位,并且与车辆真实定位信息进行误差对比,得到对比误差结果(dx, dy, dz),最终获取20cm-30cm左右的精度误差,达到自动驾驶定位需求。
视觉Camera图像中车道线及标志牌等2D关键点信息的提取采用深度学习图像算法进行提取,在复杂的真实路况中能够为单目视觉定位方案提供准确且稳定的2D关键点信息。从而与HD Map相结合,得到更精准的位置信息。
1. 充分发挥目标检测,关键点检测等图像算法优势,更好的为HD Map产品赋能;2. 硬件上仅需要普通GPS设备精度,普通摄像头,成本较低;3. 可以进行有效的高精单点定位对齐纠正,可以作为自动驾驶多传感器融合定位的一个有效定位子模块。SLAM 是Simultaneous Localization and Mapping 的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉SLAM”。我们研发的视觉SLAM定位充分发挥其地图复用与重定位的优势,实现小范围的园区或停车场等固定场景的高精度车辆定位方案。以四维图新自主研发的自动代客泊车(AVP)项目为例,通过视觉SLAM定位方案实现AVP车辆定位。采用广角摄像头捕获实际场景的图像信息,通过视觉SLAM模块对已捕获图像进行特征点匹配,而后进行重定位,并在已构建地图中实时显示当前车辆位置,从而实现地下车库车辆控制过程。
以特定园区自主泊车为例,车辆从泊车处出发,而后回到泊车处,完成整个自主泊车过程,全过程采用视觉SLAM定位方案,确保实现车辆精准控制。
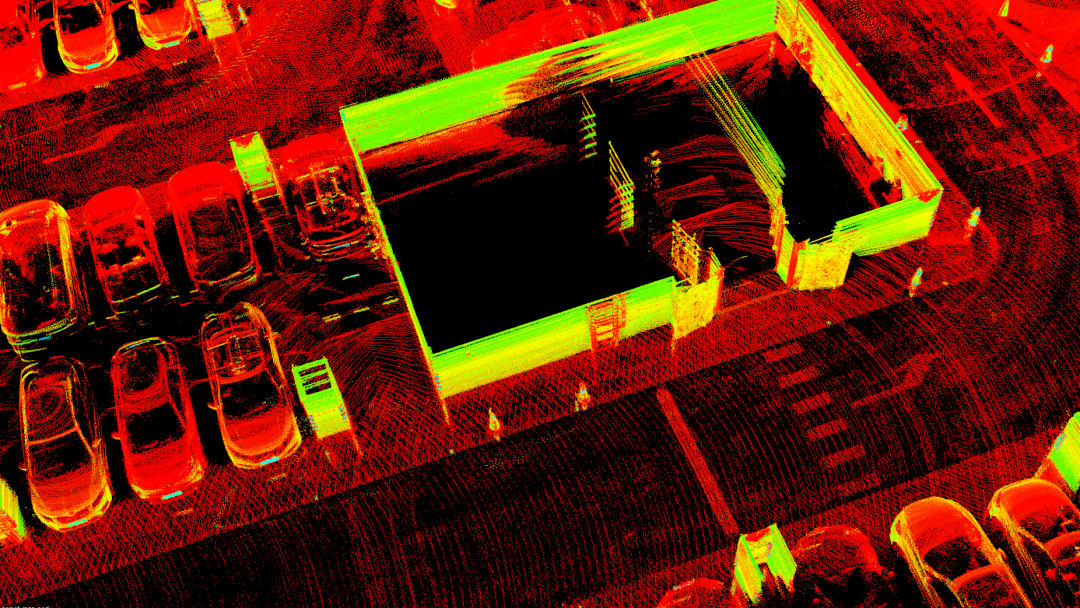
1. 仅采用单目视觉SLAM便可完成车辆定位任务,硬件成本低;2. 能够实现小范围园区和停车场的高精度车辆定位,定位精度保持在30cm左右,确保车辆控制的稳定性;3. 可以对不同型号摄像机(焦距差别较大)同样保持较强的鲁棒性,且实现一次性构图,同时发布给不同车辆使用;4. 可与轮速或IMU结合,依赖较少传感器,不需要添加额外昂贵的设备,便于推广普及。激光雷达是一种主动式传感器,通过发射激光束探测周围环境中的目标信息。激光雷达定位可以充分发挥Lidar SLAM三维重建及点云语义的优势,实现特定场景的高精度车辆定位方案。我们仍然以自动代客泊车(AVP)项目为例,通过激光雷达定位方案实现AVP车辆定位。基于Lidar SLAM技术进行特定场景的三维重建,在重建后的点云上提取Landmark的语义信息,基于kb级大小的语义定位图层,实现高精度的自动驾驶定位。该定位方案目前已经应用到自动代客泊车(AVP)系统中,实现了地下停车场和园区内全流程的高精度定位。
1. 基于自定义的语义定位图层即可实现高精度的定位,kb级的地图尺寸,方便存储、传输和复用;
2. 基于自然标志物的点云语义特征,与高精度地图完美的匹配,不依赖人工布设的Marker或者其它场端改造;
3. 在地下停车场或封闭园区内,不依赖其它传感器,即可实现10cm左右的定位精度,为车辆的道路行驶、泊车入位、障碍物相对位置感知提供可靠的保障;
4. 计算资源消耗低,不需要GPU即可实现稳定的特征提取和定位;
5. 激光雷达本身测距精准,且不易受到周围环境光源的影响,在定位、避障等方面的应用越来越多。
为了进一步落实“智能汽车大脑”战略愿景,四维图新从导航、车联网、车载智能芯片、高精度地图、高精度定位以及自动驾驶整体解决方案服务能力建设入手,不断加大研发投入力度,并通过资本协同、战略合作、联合验证等方式,加速推进产品技术商业化进程,为集团进一步打造“数字地图+车联网+自动驾驶+大数据+芯片”五位一体的技术领先优势以及自动驾驶领域的行业地位奠定基础。