实现3级汽车需要什么?
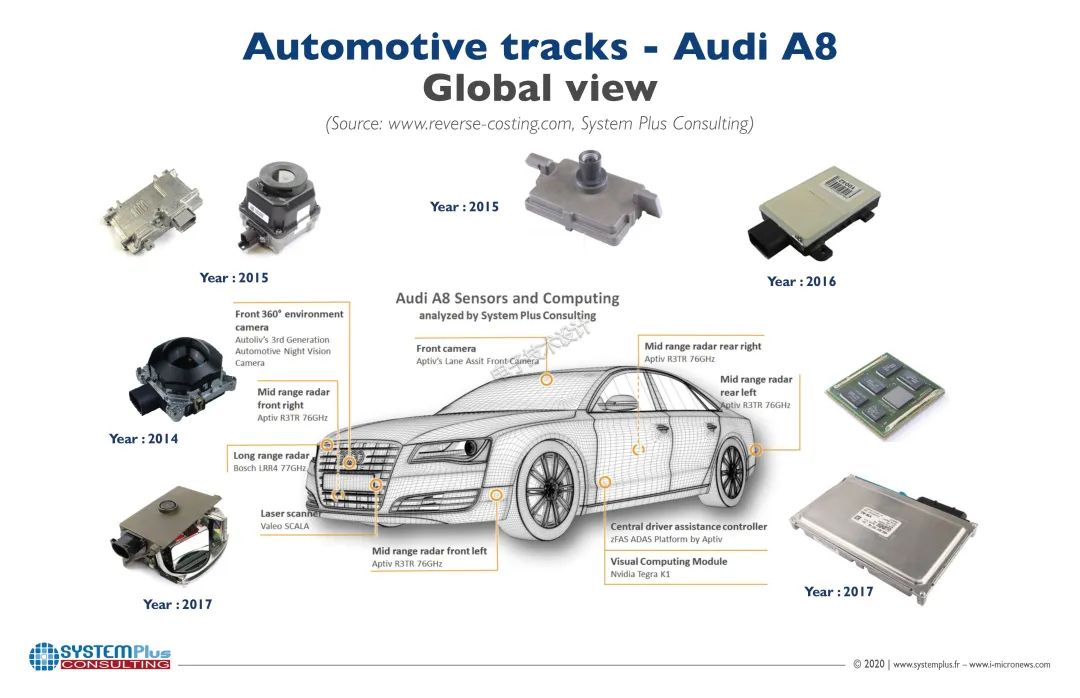
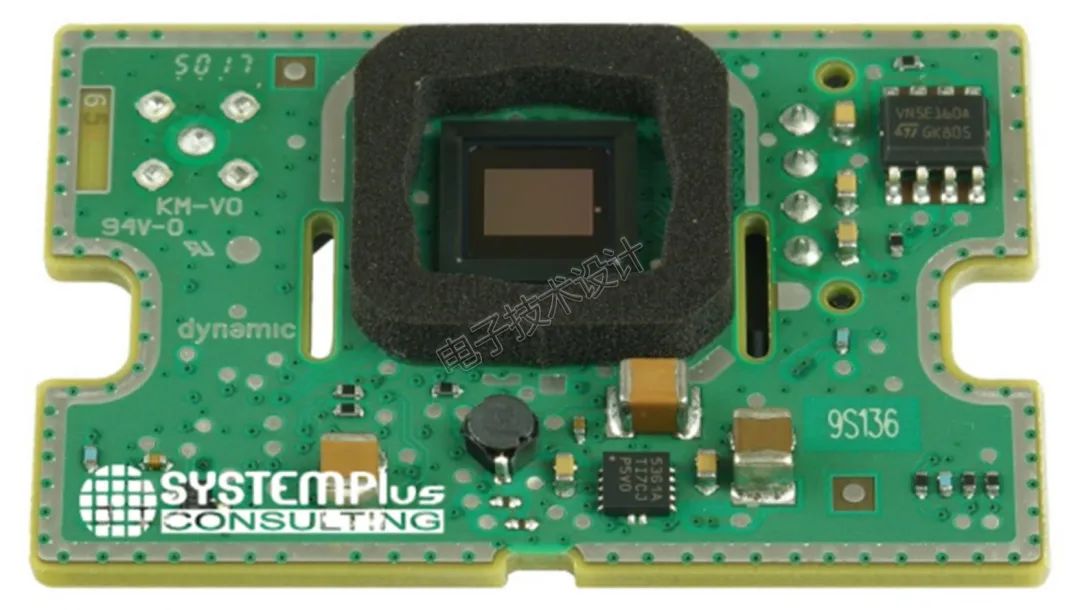
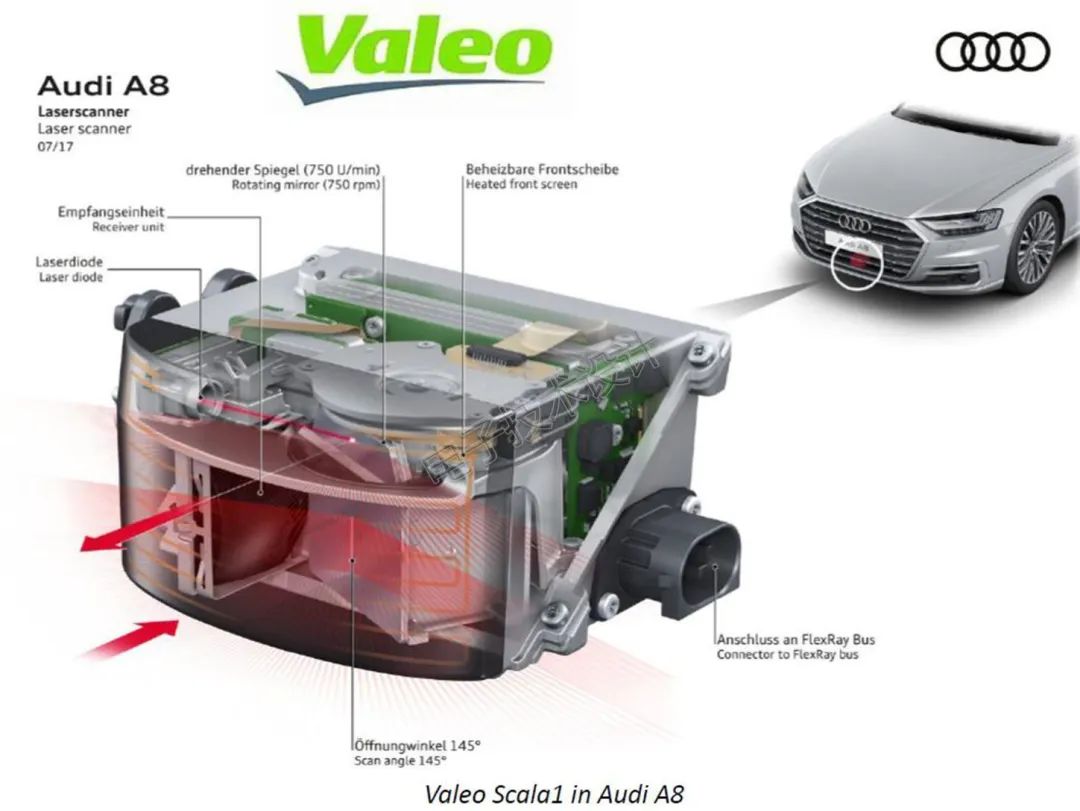
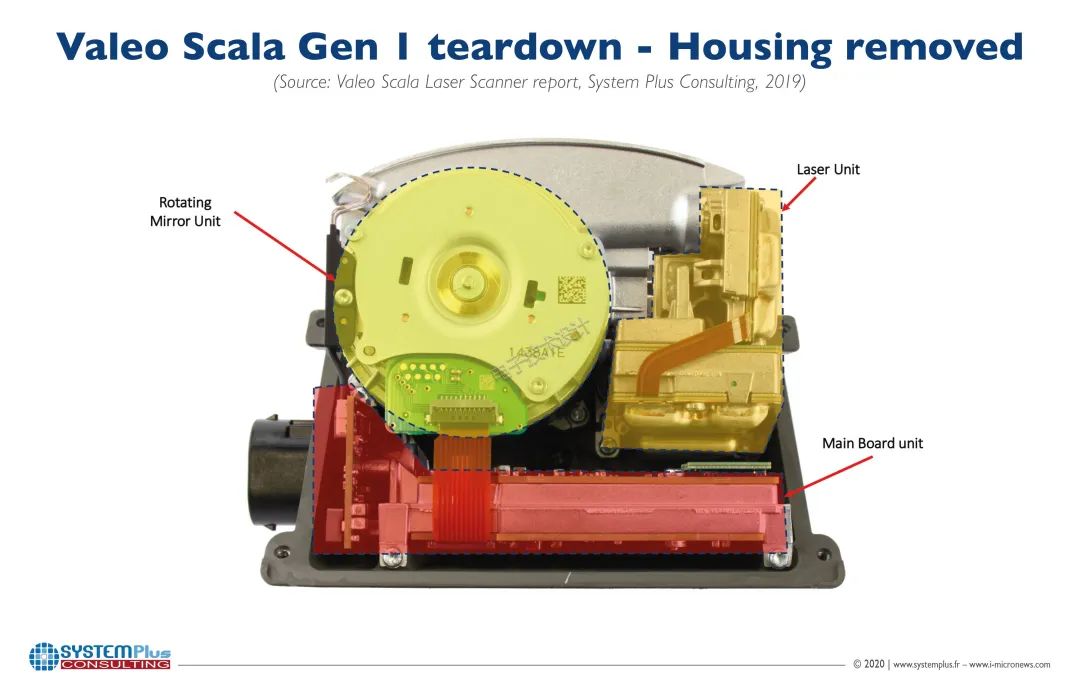
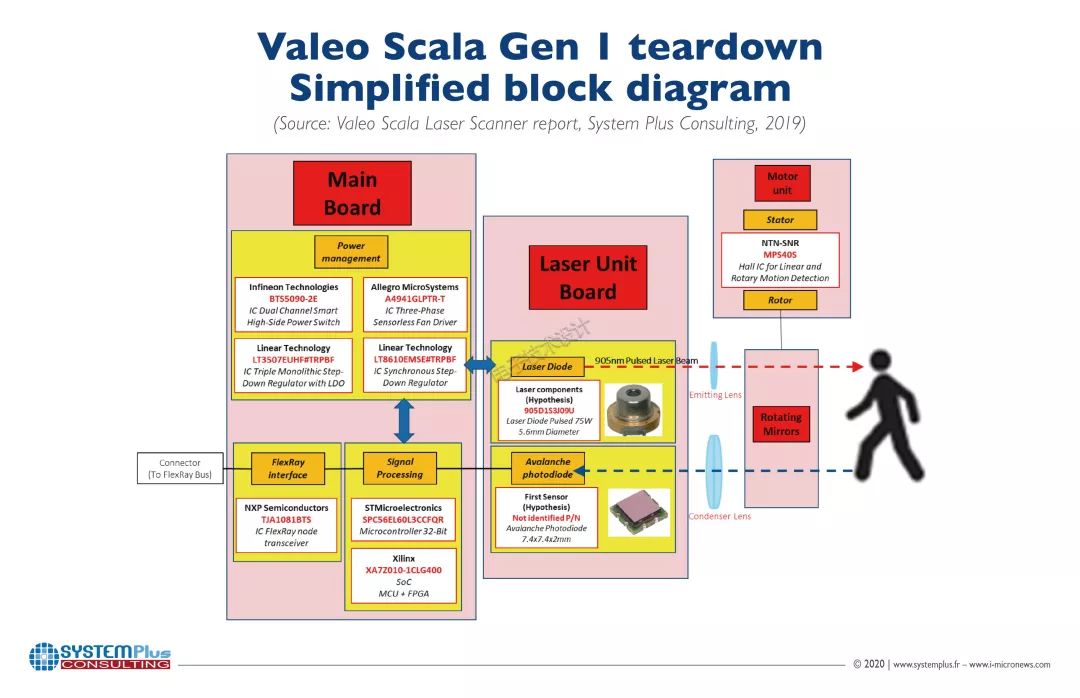
A8传感器套件中包括什么?
3级汽车需要多大处理能力?
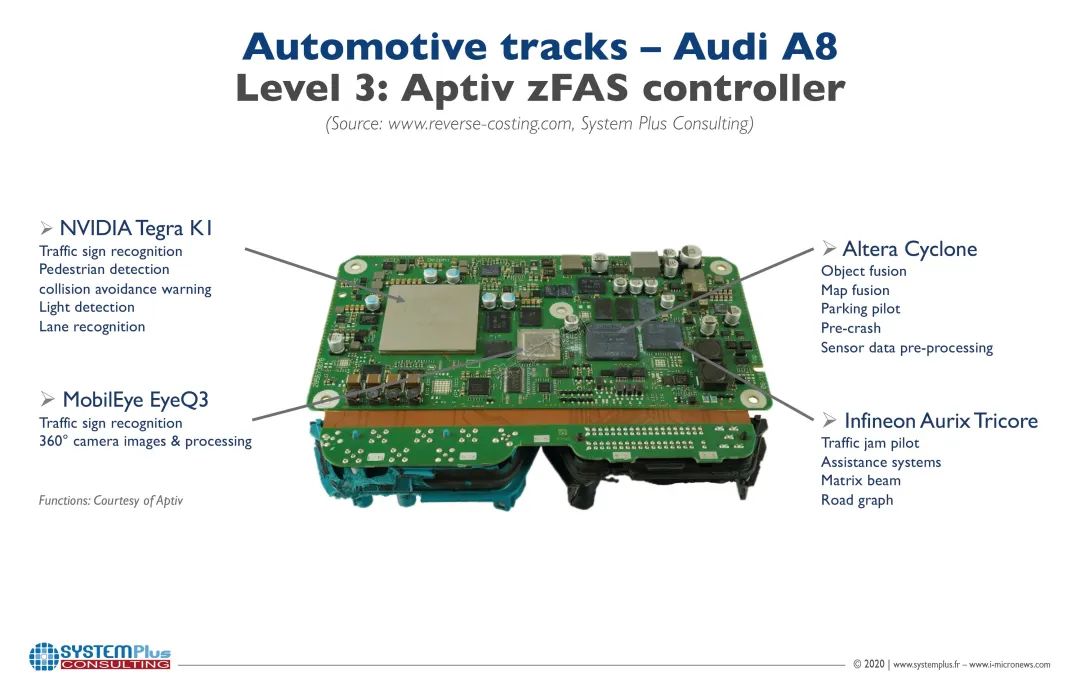
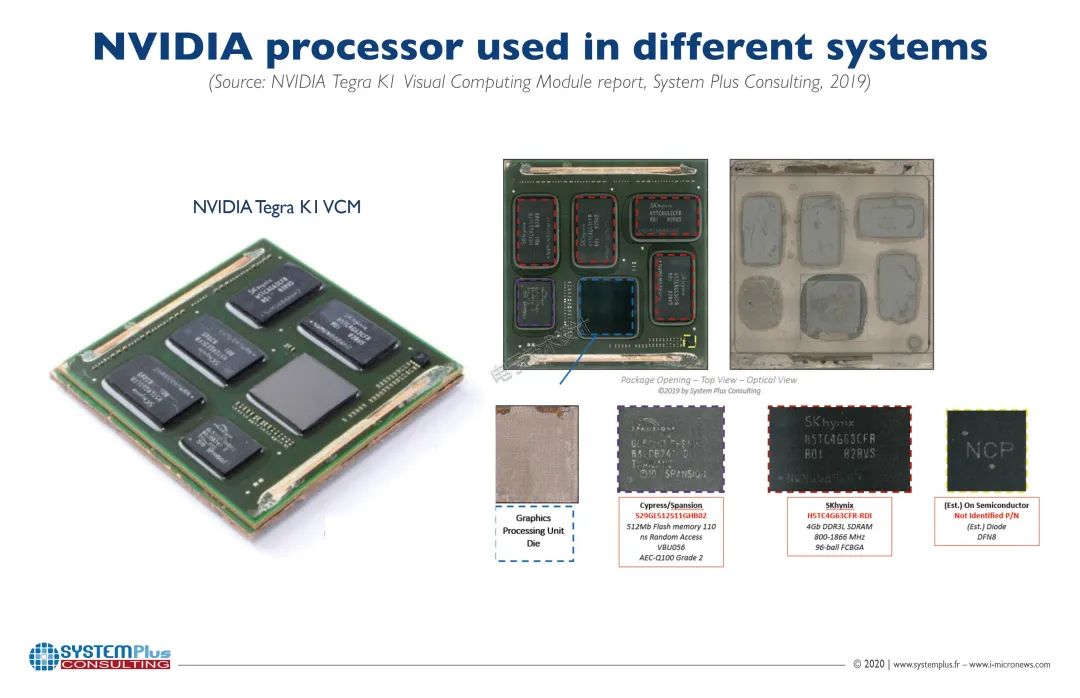
奥迪所谓的zFAS中央驾驶辅助控制器是由GPU、SoC、CPU或FPGA驱动的吗?
zFAS的成本是多少?
飞机上WiFi单元是什么样的?拆解机载卫星天线
制造专家拆解Model Y:与Model 3共享约75%的零部件
拆解黑网版“AirPods Pro”:不愧是华强北TWS的最强版本!
铷原子钟拆解:美丽的原子光
古董级德州仪器图形计算器拆解:竟然还能超频
前往“发现”-“看一看”浏览“朋友在看”
已发送
发送中