工业电机驱动中的
IGBT
过流和
短路
保护
阅芯电子科技
今天
摘要
工业电机驱动的整个市场趋势是对更高效率以及
可靠性
和稳定性的要求不断提高。
功率半导体
器件
制造商不断在导通损耗和开关时间上寻求突破。有关增加绝缘栅极
双极性晶体管
(
IGBT
)导通损耗的一些权衡取舍是:更高的
短路
电流电平、更小的芯片尺寸,以及更低的热容量和短路耐受时间。这凸显了
栅极驱动器
电路以及过流检测和保护功能的重要性。本文讨论现代工业电机驱动中成功可靠地实现
短路
保护的问题,同时提供
三相电
机控制应用中隔离式栅极驱动器的实验性示例。
1
工业环境中的
短路
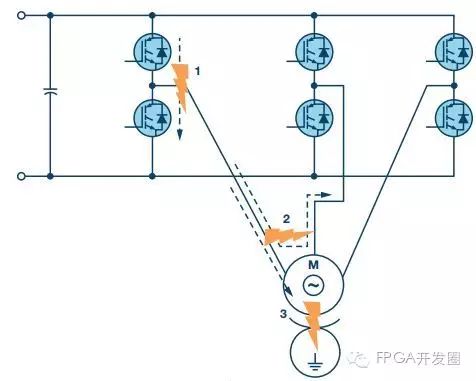
工业电机驱动器的工作环境相对恶劣,可能出现高温、交流线路瞬变、机械过载、接线错误以及其它突发情况。其中有些事件可能会导致较大的过流流入电机驱动器的功率电路中。图1显示了三种典型的
短路
事件。
它们是:
1.
逆变器
直通。这可能是由于不正确开启其中一条逆变器桥臂的两个
IGBT
所导致的,而这种情况又可能是因为遭受了
电磁干扰
或控制器故障。它也可能是因为臂上的其中一个
IGBT
磨损/故障导致的,而正常的IGBT保持开关动作。
2. 相对相
短路
。这可能是因为性能下降、温度过高或过压事件导致电机绕组之间发生绝缘击穿所引起的。
3. 相线对地
短路
。这同样可能是因为性能下降、温度过高或过压事件导致电机绕组和电机外壳之间发生绝缘击穿所引起的。一般而言,电机可在相对较长的时间内(毫秒到秒,具体取决于电机尺寸和类型)吸收极高的电流;然而,
IGBT
——工业电机驱动
逆变器
级的主要部分——
短路
耐受时间为微秒级。
图1. 工业电机驱动中的典型
短路
事件
2
IGBT
短路
耐受能力
IGBT
短路
耐受时间与其
跨导
或
增益
以及IGBT芯片热容量有关。更高的增益导致IGBT内的
短路
电流更高,因此显然
增益
较低的IGBT具有较低的短路电平。然而,较高增益同样会导致较低的通态导通损耗,因而必须作出权衡取舍。IGBT技术的发展正在促成增加短路电流电平,但降低短路耐受时间这一趋势。此外,技术的进步导致使用芯片尺寸更小, 缩小了模块尺寸,但降低了热容量,以至耐受时间进一步缩短。另外,还与IGBT集
电极
-发射极电压有很大关系,因而工业驱动趋向更高直流
总线
电压电平的并行趋势进一步缩减了
短路
耐受时间。过去,这一时间范围是10 μs,但近年来的趋势是在往5 μs3以及某些条件下低至1 μs方向发展。此外,不同
器件
的
短路
耐受时间也有较大的不同,因此对于IGBT保护电路而言,通常建议内建多于额定短路耐受时间的额外裕量。
3
IGBT
过流保护
无论出于财产损失还是
安全
方面的考量,针对过流条件的
IGBT
保护都是系统
可靠性
的关键所在。IGBT并非是一种故障
安全
元件,它们若出现故障则可能导致直流
总线
电容
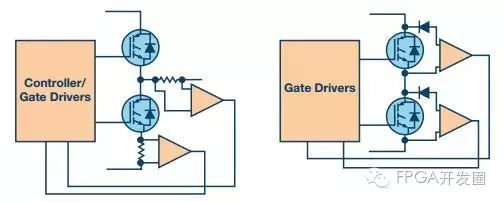
爆炸,并使整个驱动出现故障。过流保护一般通
过电流
测量或去饱和检测来实现。图2显示了这些技巧。对于电流测量而言,
逆变器
臂和相位输出都需要诸如分流
电阻
等测量
器件
,以便应付直通故障和电机绕组故障。控制器和/或
栅极驱动器
中的快速执行跳变电路必须及时关断
IGBT
,防止超出
短路
耐受时间。这种方法的最大好处是它要求在每个
逆变器
臂上各配备两个测量
器件
,并配备一切相关的信号调理和隔离电路。只需在正直流
总线
线路和负直流总线线路上添加分流
电阻
即可缓解这种情况。然而,在很多情况下,驱动架构中要么存在臂分流电阻,要么存在相位分流电阻,以便为电流控制环路服务,并提供电机过流保护;它们同样可能用于IGBT过流保护——前提是信号调理的响应时间足够快,可以在要求的
短路
耐受时间内保护IGBT。
图2.
IGBT
过流保护技术示例
去饱和检测利用
IGBT
本身作为电流测量元件。原理图中的
二极管
确保IGBT集
电极
-发射极电压在导通期间仅受到检测电路的监控;正常工作时,集电极-发射极电压非常低(典型值为1 V至4 V)。然而,如果发生
短路
事件,IGBT集
电极
电流上升到驱动IGBT退出饱和区并进入线性工作区的电平。这导致集电极-发射极电压快速升高。上述正常电压电平可用来表示存在短路,而去饱和跳变阈值电平通常在7 V至9 V区域内。重要的是,去饱和还可表示栅极-发射极电压过低,且IGBT未完全驱动至饱和区。进行去饱和检测部署时需仔细,以防误触发。这尤其可能发生在IGBT尚未完全进入饱和状态时,从IGBT关断状态转换到IGBT导通状态期间。消隐时间通常在开启信号和去饱和检测激活时刻之间,以避免误检。通常还会加入
电流源
充电
电容
或RC
滤波器
,以便在检测机制中产生短暂的时间常数,过滤
噪声
拾取导致的滤波器杂散跳变。选择这些滤波器元件时,需在噪声抗扰度和IGBT
短路
耐受时间内作出反应这两者之间进行权衡。
检测到
IGBT
过流后,进一步的挑战便是关闭处于不正常高电流电平状态的IGBT。正常工作条件下,
栅极驱动器
设计
为能够尽可能快速地关闭
IGBT
,以便最大程度降低开关损耗。这是通过较低的驱动器
阻抗
和栅极驱动
电阻
来实现的。如果针对过流条件施加同样的栅极关断速率,则集
电极
-发射极的di/dt将会大很多,因为在较短的时间内电流变化较大。由于线焊和
PCB
走线杂散
电感
导致的集
电极
-发射极电路寄生电感可能会使较大的过压电平瞬间到达IGBT(因为VLSTRAY = LSTRAY × di/dt)。因此,在去饱和事件发生期间,关断IGBT时,提供
阻抗
较高的关断路径很重要,这样可以降低di/dt以及一切具有潜在破坏性的过压电平。
除了系统故障导致的
短路
,瞬时
逆变器
直通同样会发生在正常工作条件下。此时,
IGBT
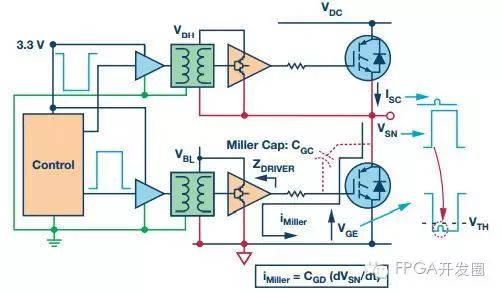
导通要求IGBT驱动至饱和区域,在该区域中导通损耗最低。这通常意味着导通状态时的栅极-发射极电压大于12 V。IGBT关断要求IGBT驱动至工作截止区域,以便在高端IGBT导通时成功阻隔两端的反向高电压。原则上讲,可以通过使IGBT栅极-发射极电压下降至0 V实现该目标。但是,必须考虑
逆变器
臂上低端晶体管导通时的副作用。导通时开关节点电压的快速变化导致容性感应电流流过低端IGBT寄生密勒栅极-集
电极
电容
(图3中的CGC)。该电流流过低端
栅极驱动器
(图3中的ZDRIVER)关断
阻抗
,在低端
IGBT
栅极发射极端创造出一个瞬变电压增加,如图所示。如果该电压上升至IGBT
阈值电压
VTH以上,则会导致低端
IGBT
的短暂导通,从而形成瞬态
逆变器
臂直通——因为两个IGBT都短暂导通。这一般不会破坏IGBT,但却能增加功耗,影响
可靠性
。
图3. 密勒感应
逆变器
直通
一般而言,有两种方法可以解决
逆变器
IGBT
的感应导通问题——使用双极性
电源
和/或额外的米勒箝位。在
栅极驱动器
隔离端接受双极性
电源
的能力为感应电压瞬变提供了额外的裕量。例如,–7.5 V负
电源
轨
表示需要大于8.5 V的感应电压瞬变才能感应杂散导通。这足以防止杂散导通。另一种方法是在完成关断转换后的一段时间内降低栅极驱动器电路的关断
阻抗
。这称为米勒箝位电路。容性电流现在流经较低阻抗的电路,随后降低电压瞬变的幅度。针对导通与关断采用非对称栅极
电阻
,便可为开关速率控制提供额外的灵活性。所有这些栅极驱动器功能都对整个系统的
可靠性
与效率有正面影响。
4
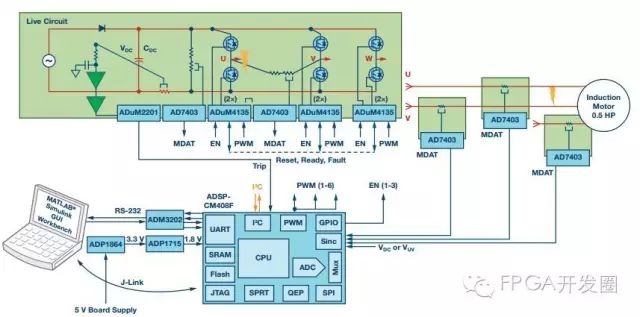
实验示例
实验设置采用三相
逆变器
,该逆变器由交流
市电
通过半波
整流器
供电。虽然系统最高可采用800 V的直流
总线
电压,但本例中的直流总线电压为320 V。正常工作时,0.5 HP感应电机由开环V/Hz控制驱动。
IGBT
采用International Rectifier提供的1200 V、30 AIRG7PH46UDPBF。控制器采用
ADI
的ADSP-CM408F Cortex®-M4F混合
信号处理
器。使用隔离式Σ-Δ AD7403调制器进行相位电流测量,使用ADuM4135实现隔离式栅极驱动(它是一款磁性隔离式
栅极驱动器
产品,集成去饱和检测、米勒箝位和其它
IGBT
保护功能)。在电机相位之间,或在电机相位和负直流
总线
之间手动开关
短路
,进行
短路测试
。本例中未
测试
短路
至地。
控制器和
电源
板如图5所示。它们均为
ADI
公司的ADSP-CM408FEZ-kit®6和EV-
MCS
-ISOINVEP-Z隔离式
逆变器
平台。
图4. 实验设置
图5.
ADI
隔离式
逆变器
平台搭配全功能
IGBT
栅极驱动器
实验硬件中,通过多种方法实现
IGBT
过流和
短路
保护。它们分别是:
直流
总线
电流检测(
逆变器
直通故障)
电机相位电流检测(电机绕组故障)
栅极驱动器
去饱和检测(所有故障)
对于直流
总线
电流检测电路,必须加一个小型
滤波器
,避免误触发,因为直流
总线
电流由于潜在的高
噪声
电流而断续。采用具有3 μs时间常数的RC滤波器。检测到过流后,其余有关
IGBT
关断的延迟是通过
运算
放大器
、
比较器
、
信号
隔离器
、ADSP-CM408F中的跳变响应时间,以及
栅极驱动器
传播延迟
。这会额外增加0.4 μs,使得故障至关断的总时间延迟为3.4 μs——远低于很多
IGBT
的
短路
时间常数。类似的时序同样适用于采用AD7403以及ADSP-CM408F处理器上集成式过载检测sinc
滤波器
的电机相位电流检测。采用时间常数为3 μs左右的sinc滤波器可良好运作。在这种情况下,其余系统延迟的原因仅会是跳变信号内部路由至PWM单元以及存在栅极驱动器
传播延迟
,因为过载sinc
滤波器
是处理器的内部元件。连同电流检测电路或快速
数字滤波器
的反应时间,无论使用何种方法,两种情况下的ADuM4135超短
传播延迟
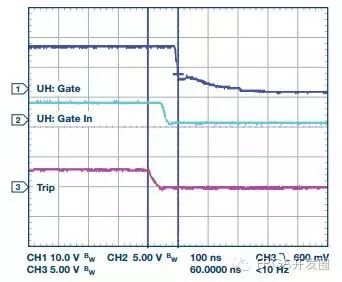
对实现有效的快速过流保护非常重要。图6显示了硬件跳变信号、PWM输出信号和其中一个
逆变器
臂的上方
IGBT
实际栅极-发射极
波形
之间的延迟。图中可以看到,IGBT开始关断后的总延迟约为100 ns。
图6. 过流关断时序延迟(通道1:栅极-发射极电压10 V/div;通道2:来自控制器的PWM信号5 V/div;通道3:低电平有效跳变信号5 V/div;100 ns/div)
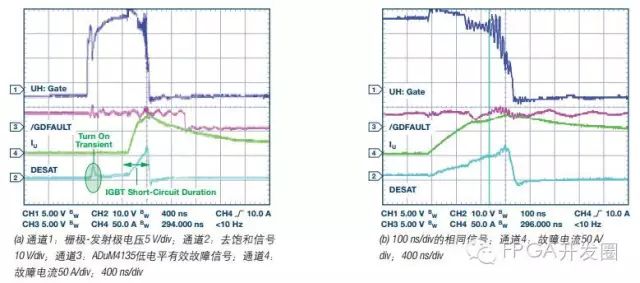
栅极驱动器
去饱和检测比上文描述的过流检测方法执行速度快得多,且对于限制
短路
电流所允许上升的上限很重要,从而提升了系统的整体稳定性,并超过了可以实现的水准,哪怕系统带有快速过流保护功能。这显示在图7中。当发生故障时,电流快速上升——事实上,电流远高于图中所示,因为图中以
带宽
限制20 A电流探针进行测量,仅供参考。去
饱和电压
达到9 V跳变电平,栅极驱动器开始关断。显然,
短路
的整个持续时间不足400 ns。电流的长尾表示下方
IGBT
反并联
二极管
中的续流导致的感应
电能
。开启时,去
饱和电压
的初始增加是杂散去饱和检测
电动势
的一个例子,这是由于集
电极
-发射极电压瞬态所导致。可以通过增加去饱和
滤波器
时间常数,从而增加额外的消隐时间而消除。
图7.
IGBT
短路
检测
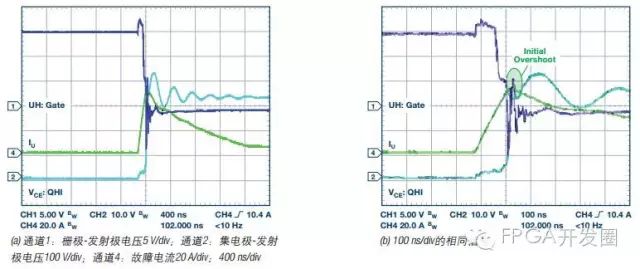
图8.
IGBT
短路
关断
图8显示了
IGBT
上的集
电极
-发射极电压。由于去饱和保护期间,关断的
阻抗
较大,因此初始受控
过冲
约为320 VDC
总线
电压以上80 V。电流在下游反并联
二极管
中流动,而电路寄生实际上使得电压
过冲
略高,最高约为420 V。
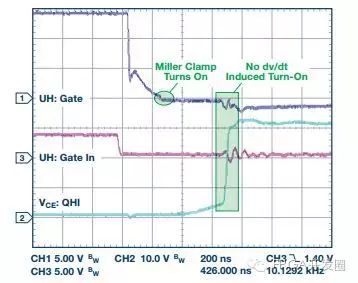
图9. 开启时的米勒箝位 通道1:栅极-发射极电压5 V/div;通道2:来自控制器的PWM信号5 V/div;通道3:集
电极
-发射极电压100 V/div;200 ns/div
图9显示了正常工作时,米勒箝位防止
逆变器
直通的价值。
5
小结
随着
IGBT
的
短路
耐受时间下降至1 μs的水平,在极短的时间内检测并关断过流和短路正变得越来越重要。工业电机驱动的
可靠性
与IGBT保护电路有很大的关系。本文罗列了一些处理这个问题的方法,并提供了实验结果,强调了稳定隔离式
栅极驱动器
IC (比如
ADI
公司的ADuM4135)的价值。
阅读
在看
已同步到看一看
写下你的想法
前往“发现”-“看一看”浏览“朋友在看”
前往看一看
看一看入口已关闭
在“设置”-“通用”-“发现页管理”打开“看一看”入口
我知道了
已发送
取消
发送到看一看
发送
工业电机驱动中的IGBT过流和短路保护
最多200字,当前共
字
发送中