四旋翼无人机结构组成及飞行控制原理介绍


四旋翼飞行器具备结构简单、机动性强、可垂直起降、定点悬停、容易操作等特点,被广泛的应用于影视航拍、电力巡检、情报监视、战损评估等场景。随着芯片、人工智能、大数据技术的发展,无人机开始了智能化、终端化、集群化的趋势,多元应用场景也使得大批自动化、机械电子、信息工程、微电子的专业人才投入到了无人机研发大潮中,飞控技术的发展在这个过程中无疑起到至关重要推动的作用。
什么是飞行控制系统?
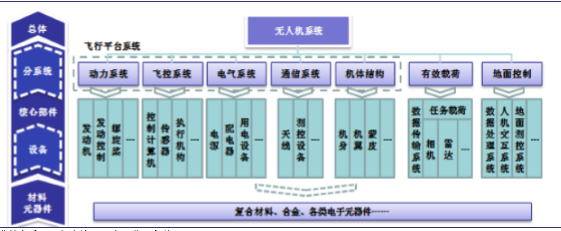
无人机主要由动力系统、飞行控制系统、电气系统、通信系统以及地面控制等多方面构成。飞行控制系统,是无人机的核心系统,其涵盖了任务管理、航迹管理、回收管理、信息传输等多方面的功能。在整个控制系统当中,传感器是核心部件。现阶段无人机的传感器主要包括高度、姿态、位置、角速率、角速度等传感器。当前控制系统中,主处理控制器包括通用处理器(MPU)、微处理器(MCU)、数字信号处理器(DSP)、可编程门阵列(FPGA)等。
飞行控制系统的主要作用是什么?
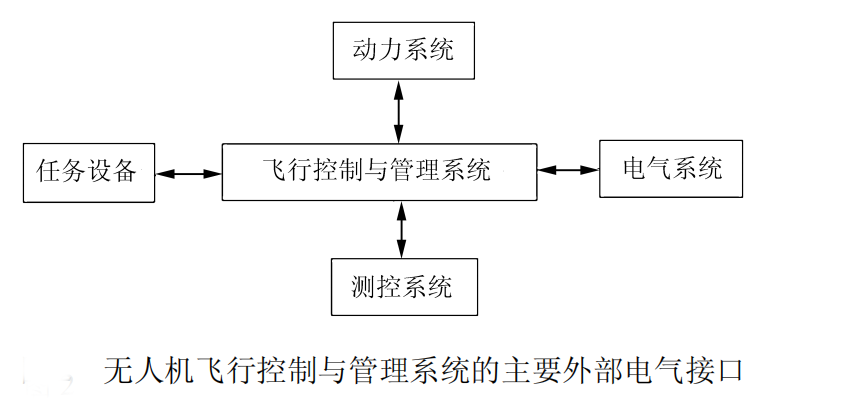
飞行控制系统实时采集各传感器测量的飞行状态数据、接收无线电测控终端传输的由地面测控站上行信道送来的控制命令及数据,经计算处理,输出控制指令给执行机构,实现对无人机中各种飞行模态的控制和对任务设备的管理与控制;同时将无人机的状态数据及发动机、机载电源系统、任务设备的工作状态参数实时传送给机载无线电数据终端,经无线电下行信道发送回地面测控站。
无人机飞行控制原理
四旋翼无人机机身是由对称的十字形刚体结构构成;在十字形结构的四个端点分别安装一个由两片桨叶组成的旋翼为飞行器提供飞行动力,每个旋翼均安装在一个电机转子上,通过控制电机的转动状态控制每个旋翼的转速,来提供不同的升力以实现各种姿态;每个电机均又与电机驱动部件、飞行控制单元相连接,通过飞行控制单元提供的控制信号来调节转速大小;
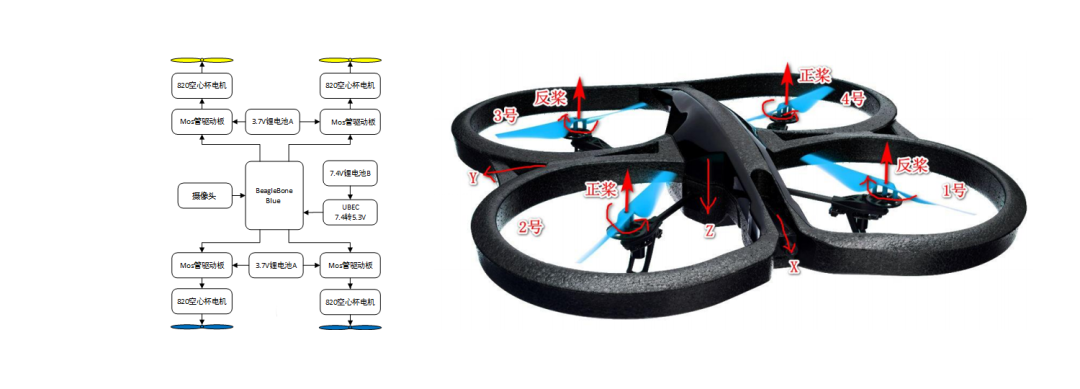
现将位于四旋翼机身同一对角线上的旋翼归为一组,前后端的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端旋翼沿逆时针方向旋转,从而产生逆时针方向的扭矩,如此四个旋翼旋转所产生的扭矩便可相互之间抵消掉。由此可知,四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。
无人机飞行控制系统研发难点表现在哪些方面?
1、复杂系统的稳定性:飞控系统是一个庞大复杂的系统,是集飞行导航、飞行动力学、飞行制导与控制于一体的系统化概念,作为无人机的控制中心和和指挥中心,在实际作业中可以实时采集飞行信息和大气环境参数,并与地面控制中心形成闭环反馈,从而实现隔空控制和轨迹调整,是决定无人机自动稳定飞行的核心部件,决定着无人机飞行的稳定性和操纵性。
2、对无人机的理解和对行业应用的理解之间的衔接:以航拍无人机和植保无人机为例,航拍无人机需要获取稳定的影像数据、因此即便无人机出现抖动、摇晃、甚至不断点头调整姿态都是允许的,但是对于喷洒农药的植保无人机来说,如果出现抖动、晃动、点头,可能就会影响喷洒效果。所以不同的应用场景决定了无人机飞行控制系统设计的侧重点、如何设计出相应的功能来满足相应的需求,这是真正难的地方。

3、无人机飞控研发对实验室场地及操作安全性要求极高,目前市面上的无人机相关产品主要集中在实操学习和基本的结构性学习范围内,能够进行控制原理学习及仿真的硬件产品不多,完全开放飞控可进行二次开发的更是少之又少。学校在进行各类仿真实验时既希望向学生讲述原理性的知识,也希望学生能对实际无人机进行相关的控制实验。
灵思创奇经过数年积累,研发出一套四旋翼飞行控制实验平台,该平台是集教学与科研目的为一体的多功能实验台,其在满足老师日常教学实验的同时,兼顾无人机平台姿态控制、制导导航、力学等学科专业的科学研究。
注:点击图片可了解产品详情
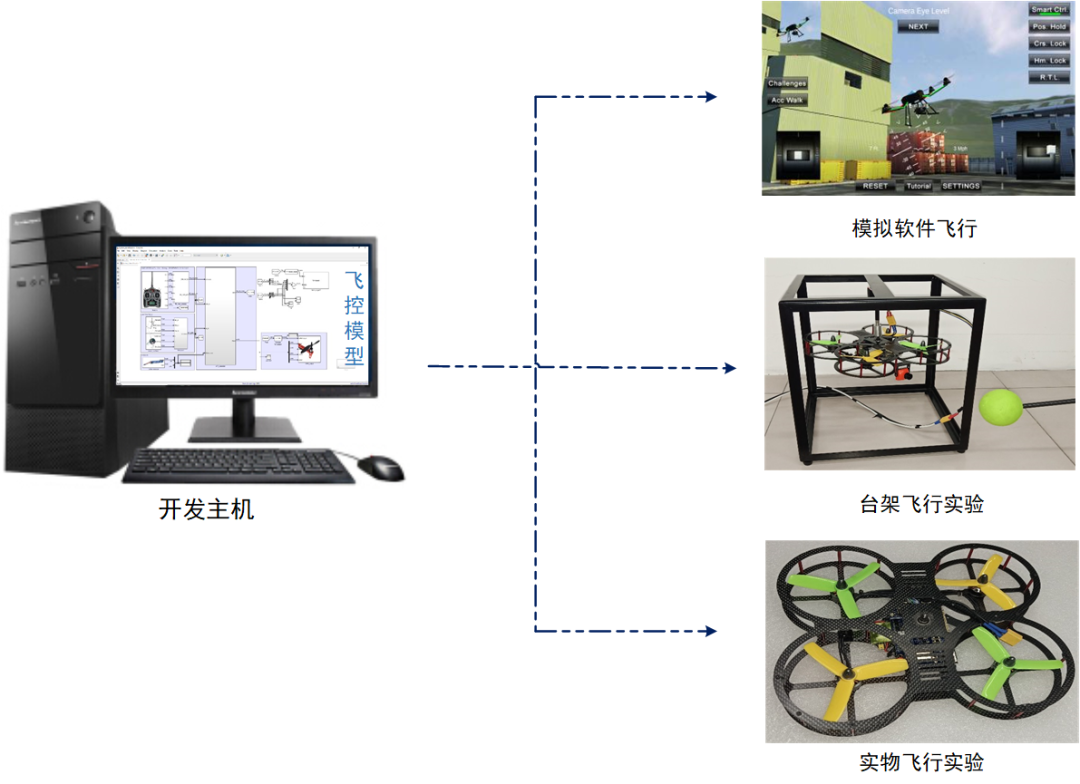
本平台采用先进的基于模型的设计(MBD)开发思路,可支撑控制系统数学仿真实验、模拟软件飞行实验、台架实验、实物飞行实验,具备模型编译、下载、数据监视记录、后处理等完成的工具软件,能够帮助学生熟悉整套控制系统设计流程。


相关产品


相关阅读

北京灵思创奇科技有限公司
电话:010-5732 5131
传真:010-5732 5130
网址:www.linkstech.com.cn
微信公众号:LINKS-TECH
地址:北京市昌平区北控宏创科技园13号楼