思瑞浦模拟芯片助力扫地机器人智能化
扫地机器人作为智能家居硬件中的一员,智能化程度已越来越高;持续的技术升级,主要体现在两个功能上:第一是定位导航功能,让机器准确知道自己的位置,以便准确规划清扫路线;第二是清扫功能,让清扫更高效、清洁。而不断的技术创新,就需要通过更高性能的模拟芯片来实现。
思瑞浦(3PEAK)专注于高性能模拟芯片研发,在扫地机器人行业耕耘多年,持续为扫地机器人行业提供一系列高性能芯片产品,如运算放大器、数据转换器(ADC)、线性稳压器(LDO)、模拟开关等。
下面将介绍思瑞浦(3PEAK)模拟器件如何助力扫地机器人实现定位导航功能与清扫功能。
定位导航功能
最初的扫地机器人没有定位导航功能,采用“走到哪、撞到哪”的随机清扫方式,不够智能化;
红外障碍感应
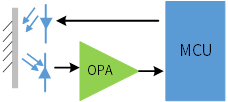
图1、近红外障碍感应功能原理

思瑞浦 LMV358B是一款高性价比的运放,其失调电压Vos为正值,可以避免做I/V转换电路时,较小的输入信号因为Vos为负值被抵消而难以检测的问题。
LDS激光测距
三角测距法
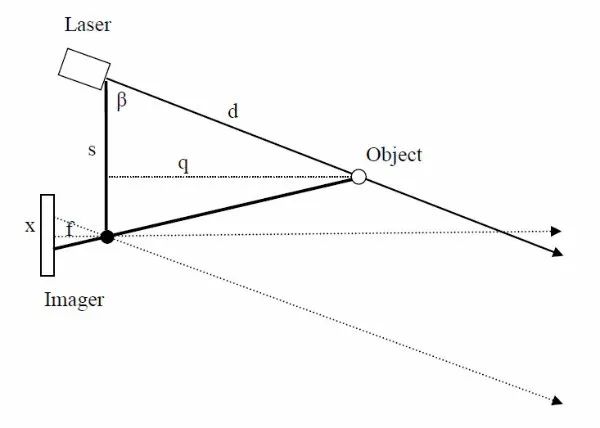
图2、三角测距法测距原理
分立式CMOS方案对于ADC的需求
CMOS传感器输出最低频率:1024个像素点*10kHz帧刷新率=10MHz,故ADC采样率需要10MHz以上
输出信号:随时钟移位输出的脉冲信号
CMOS传感器输出信号:0-2V
电压Buffer速度要求:>10MHz
ADC分辨率:10bit
ADC类型:并行,外接时钟同步采样
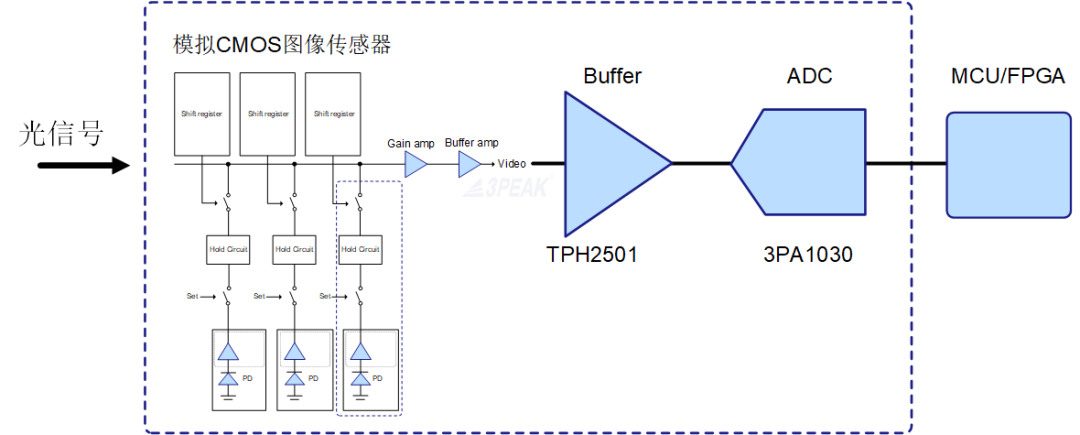
图3、LDS分立式CMOS传感器解决方案

思瑞浦高速ADC--3PA1030,采用Pipeline流水线型架构,分辨率为10bit,采样速率可达50M,配合Buffer运放TPH2501使用,能够快速完成距离信息的采集。
TOF飞行时间

图4、TOF飞行时间法解决方案
由于光的传播速度非常快,若要精确测量距离,对于信号处理电路要求会很高,信号处理电路的整体延时时间要非常小。

思瑞浦高速运放TPH2501,具有250M增益带宽、100V/uS的压摆率等特性;高速比较器TP1981,传播延时时间典型值达到3.5nS。
清扫功能
电机的应用

针对扫地机器人市场,思瑞浦双通道运放LMV358B,对ESD以及Latch-up性能做了优化:
通过了±8kV的IEC61000-4-2的ESD测试
高温下(125℃)Latch-up测试,能够通过500mA
具有较强的抗静电能力
超声传感器的应用
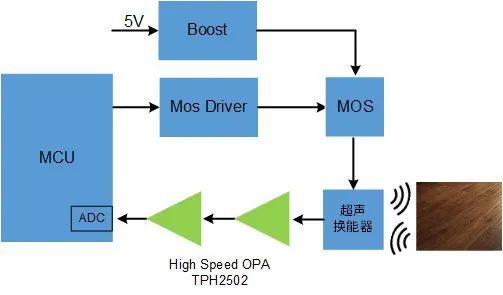
图5 、超声传感器模块的解决方案

思瑞浦高速运算放大器TPH2502,250MHz单位增益带宽,压摆率达到了180V/uS,适合用于超声模块中的信号处理。

