英伟达旗舰自动驾驶平台硬件架构与成本分析
鉴于Orin要到2022年才能量产,目前英伟达自动驾驶平台旗舰还是Pegasus,不过附加的AI加速器已经从2017年发布时的Tesla V100升级到图灵GPU。
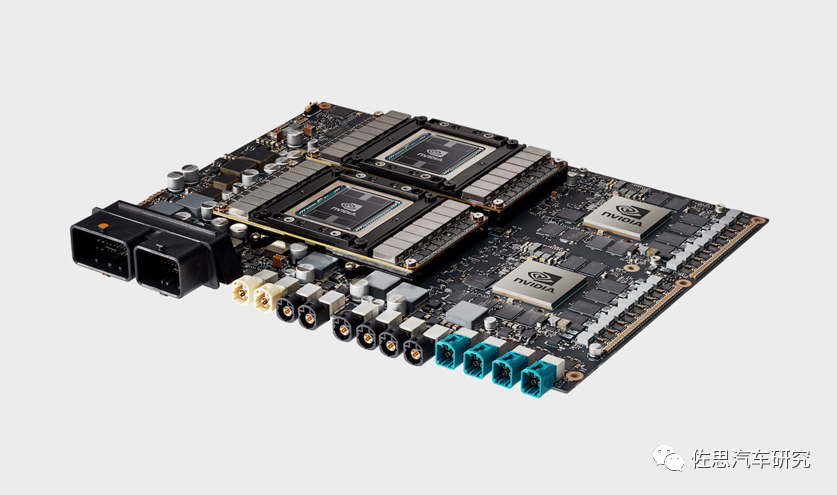
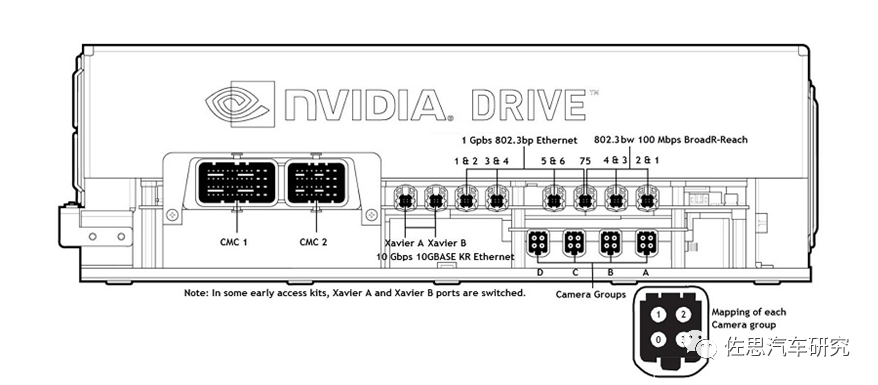
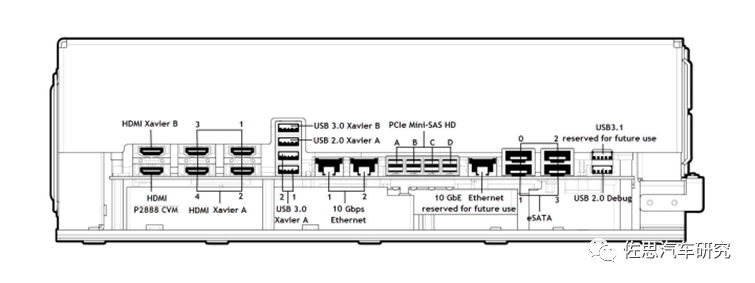
英伟达AGX Xavier Pegasus,注意,Xavier的载板(Carrier Board)并未在照片中显示。

上表为Drive AGX Pegasus主要集成电路表,未计算图灵GPU的价格,因为难以估算。总计大约6090元人民币,Marvell是大赢家,Marvell 总计占2280元人民币,几乎是两片Xavier价格的两倍,最赚钱不是英伟达,而是Marvell。Marvell的技术含量高。
2019年5月,博通以4.52亿美元的代价收购了Aquantia,这家公司基本上只有一个产品就是AQC107,基本上是市面上唯一的万兆以太网卡主芯片,车载万兆以太网领域基本上是垄断地位。随着汽车以太网大量普及,博通和Marvell都会从中获益,汽车在Marvell的总收入的比例不高,估计不到5%。不过BroadR-Reach 车载以太网PHY已经是市场主流,目前博通汽车以太网产品总体收入额应高于Marvell。
软件与其他部分如下:
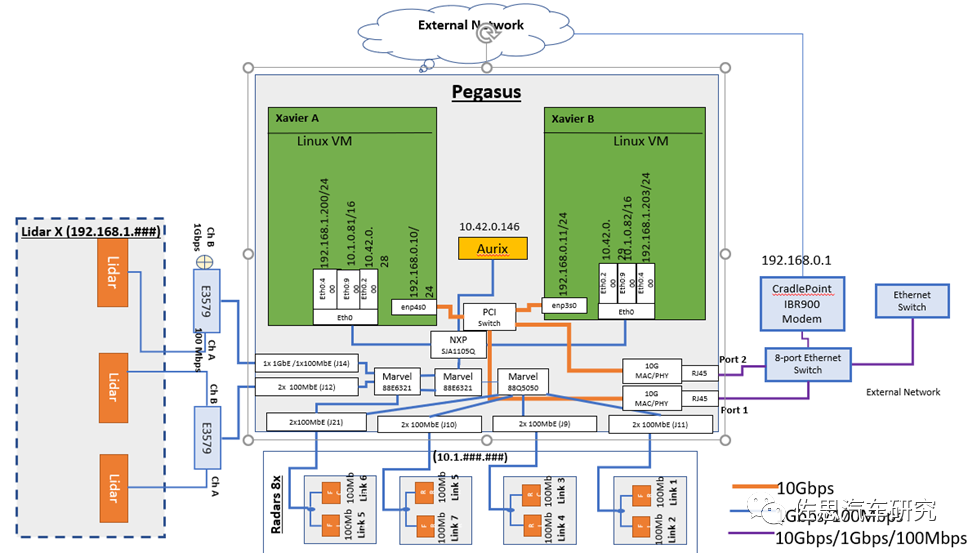
上图是Pegasus的框架图。传感器部分可以分为三部分,毫米波雷达,激光雷达和视觉部分。典型状态,Pegasus支持3个激光雷达,8个毫米波雷达,16个摄像头。激光雷达部分,通常是一个64/128线和两个16线激光雷达,前者需要1GbE的带宽,后者只需要100MbE的带宽。E3579是英伟达做的一个转换器,通常激光雷达都是RJ45接口输出,而Pegasus采用车规级HSD(高速数据)接口,E3579就是以太转HSD接口的小盒子。一个88E6321的以太网交换机接纳激光雷达信号。
毫米波雷达部分,设计了8个,其中有两个支持到1GbE,即高分辨率图像雷达,其余6个为一般雷达,带宽100MbE足够。一个88Q5050负责接纳毫米波雷达信号。Xavier载板即CVM与两片Xavier和PCIe交换机连接,同时也与一个88E6321以太交换机连接。图上没有画出。
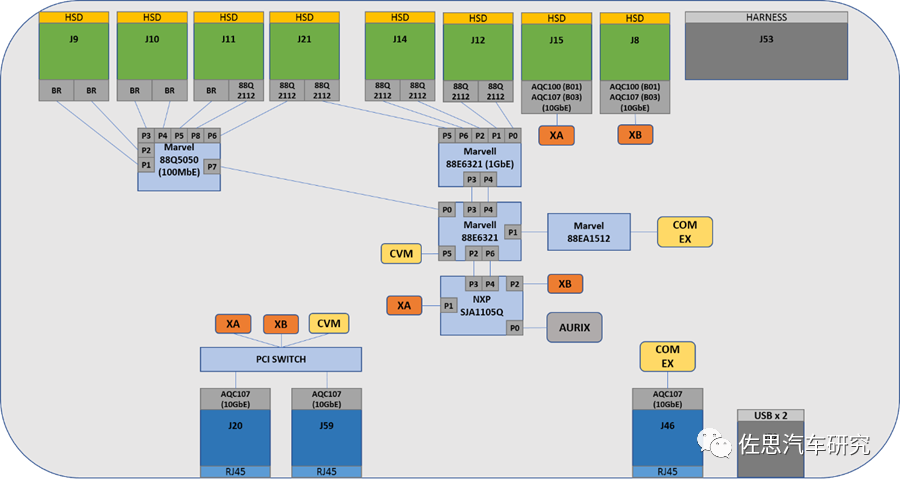
上图为网络拓扑图。CVM即Xavier的载板,XA即Xavier A。88Q5050收取毫米波雷达信号,一个88E6321收取激光雷达信号,然后再进入到一个88E6321之中,CVM也进入这个以太交换机中,三者做传感器融合,应该只有前向主视觉摄像头进入融合。NXP1105Q做最后一个以太网交换机。Microchip的PM3584PCIe交换器与两片Xavier与两片外接加速器连接,同时还有CVM。在第二个88E6321上还通过88EA1512连接了外接通讯端口,应对V2X。
视觉方面,主要芯片是美信的GMSL芯片,目前美信最高等级的GMSL芯片是MAX9296,摄像头里对应的芯片为MAX9295。最高带宽为12GBps,只能对应两个800万像素。德州仪器量产芯片中,最高就是DS90UB960,只能对应6Gbps带宽。Pegasus里总带宽高达48Gbps,可以接纳16个400万像素30帧摄像头。英伟达推荐主摄像模组有韩国Sekonix 的SF3325,传感器为230万像素的AR0231,索尼的IMX390EVB-MLH-SMM1,传感器为245万像素的IMX390,也有800万像素的AR0820,以及746万像素的IMX424,还有544万像素的IMX490,全部都过了车规,支持二代GMSL。其他图像传感器可能不支持二代GMSL。
激光雷达方面,兼容性比较好的有:

后两者还没有上市。很明显,Luminar没有想象中那么强大,性能最好的还是VLS128。Ouster的牺牲了距离,换取了最高的260万像素。
「佐思研究年报及季报」
「佐思研究月报」
车联网月报 | ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报 | V2X与车路协同月报
报告订购联系人: 佐思客服 18600021096(同微信) 廖棪 13718845418(同微信)