ECCV 2020 | 利用全局优化算法处理事件相机运动估计问题
关注并星标
从此不迷路
Jiangmen
作者:上海科技大学在读博士生 彭欣

ECCV 2020系列文章专题
第·20·期

更多ECCV精彩内容,后台回复“ECCV”即可查看!

什么是事件相机(event camera)
事件相机是一种受生物启发设计的新型视觉传感器,其工作原理完全不同于传统相机。传统相机以固定的时间间隔周期性采集一张完整的图片,而事件相机的每个像素都是独立异步工作的。当某个像素点的亮度变化达到一定阈值时,事件相机就会输出一个“事件”(“event”),如图1所示。相比于传统相机,事件相机具有低延迟(<𝟏𝝁𝒔)、高动态范围(𝟏𝟒𝟎𝒅𝑩)、极低功耗(𝟏𝒎𝑾)等特性。
对比度最大化
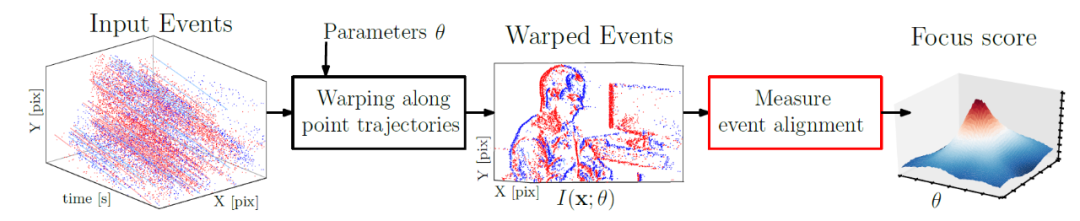
图2 “对比度最大化”算法流程
由于事件相机的特殊性质,传统的视觉算法不能直接应用在事件相机上,因而需要新的针对于事件相机的算法。Gallego et.al. [1] 提出了“对比度最大化”作为目标函数用于基于事件相机的光流、运动和深度估计,如图2。其原理是基于当使用正确的参数将事件转换到参考帧时,其形成的图片(IWE, Imageof Warped Events)是最清晰的。[2]和[3]中列举了用于表征图片清晰的目标函数,包括对比度,像素亮度平方和,熵等。
基于BnB的全局优化算法
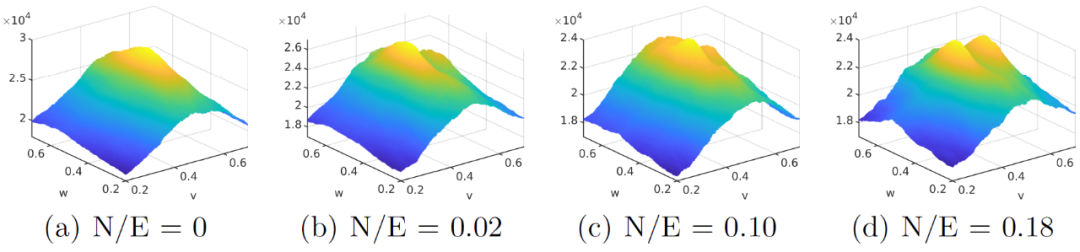
图3 目标函数的能量图。可见“对比度最大化”是一个非凸问题。
虽然“对比度最大化”被广泛应用在基于事件相机的计算机视觉问题,但是已有的算法都是基于局部优化(如梯度法)。由于目标函数是非凸的(图3),因而局部优化极易被困在局部解中。针对这个问题,我们提出了基于分支定界法(BnB)的全局优化算法,推导出针对六个不同目标函数的递归的上界和下界,从而高效地估算出全局最优解。
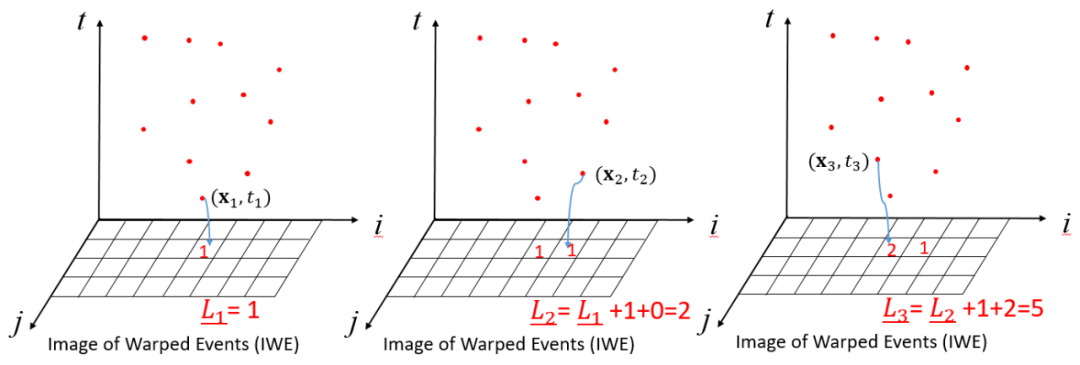
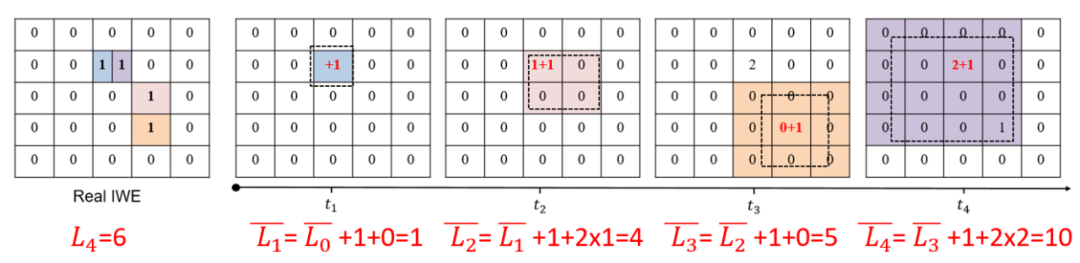
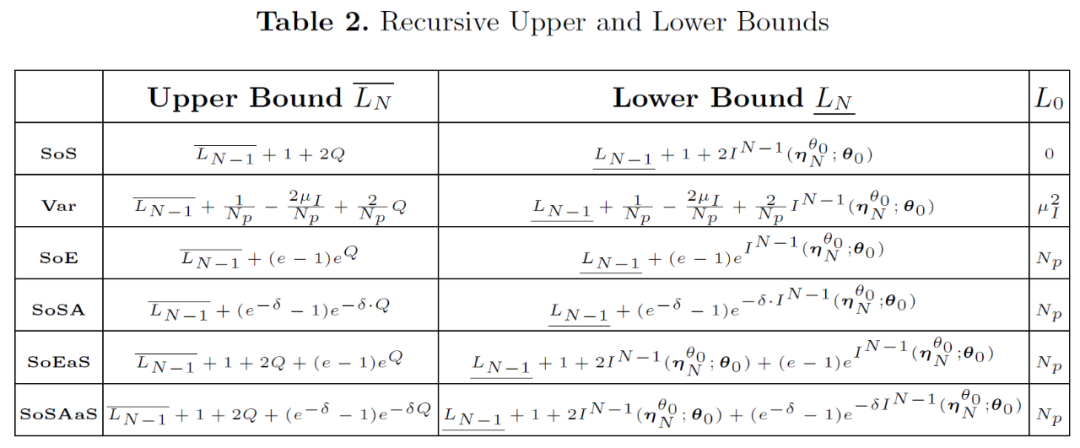
上界和下界的计算方法如图4和图5所示,详细推导过程请参考我们的论文[4]。下表列举了我们推导的六个目标函数的上界和下界。
实验
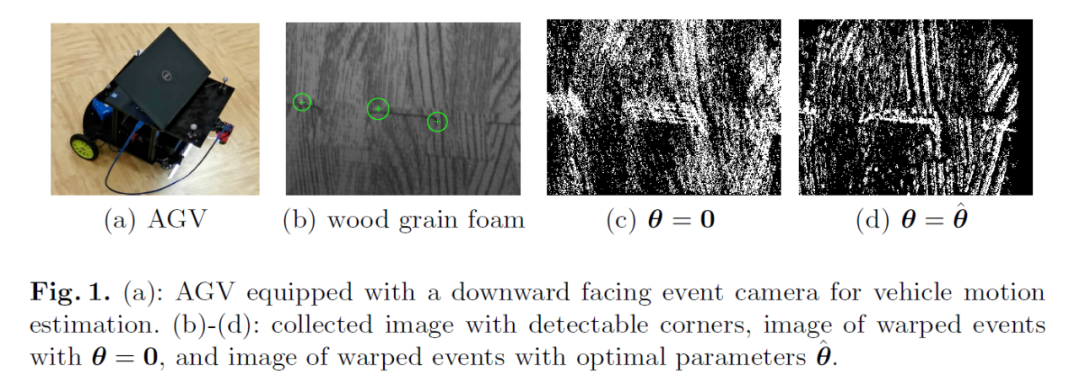
我们把提出的全局优化算法应用在朝地面看的事件相机运动估计上。这种场景下的纹理重复性高特征点少,基于传统相机的算法在这种场景下很难工作,然而事件相机可以很好的工作。
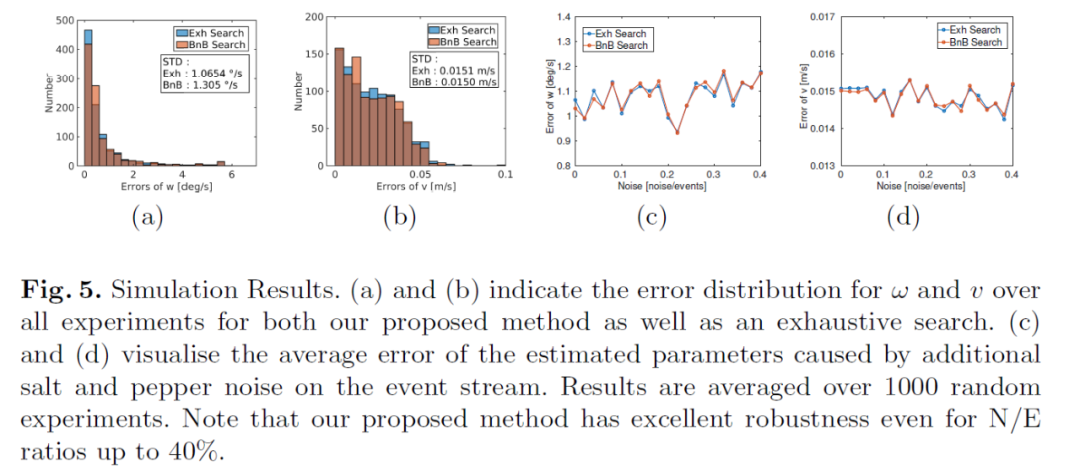
准确度和鲁棒性
“对比度最大化”针对椒盐噪声的鲁棒性很好。
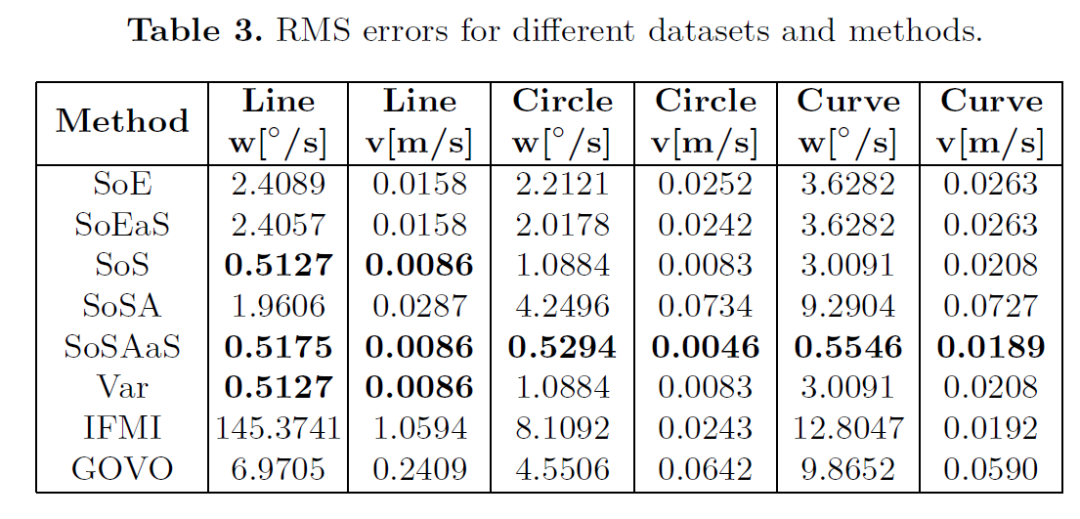
不同目标函数
事件相机vs 传统相机
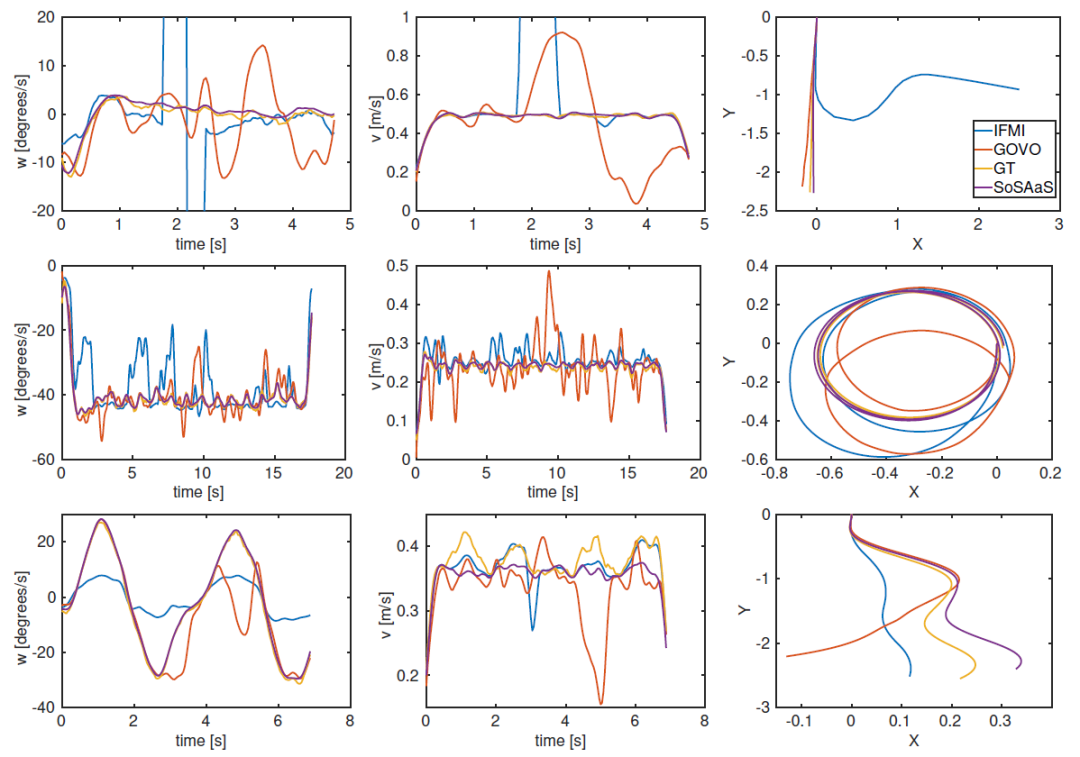
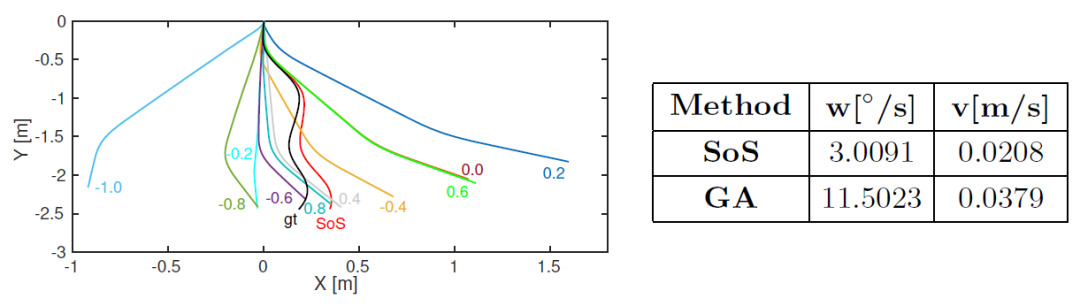
全局优化 vs 局部优化
不同纹理场景

彭欣,上海科技大学(ShanghaiTech)计算机科学与技术专业二年级博士生在读,导师为Laurent Kneip。她的研究方向是visual-SLAM,event-based camera的视觉算法。
邮箱:pengxin1@shanghaitech.edu.cn
课题组网页:http://mpl.sist.shanghaitech.edu.cn/
欢迎联系!

关于我“门”
▼
将门是一家以专注于发掘、加速及投资技术驱动型创业公司的新型创投机构,旗下涵盖将门创新服务、将门技术社群以及将门创投基金。将门成立于2015年底,创始团队由微软创投在中国的创始团队原班人马构建而成,曾为微软优选和深度孵化了126家创新的技术型创业公司。
将门创新服务专注于使创新的技术落地于真正的应用场景,激活和实现全新的商业价值,服务于行业领先企业和技术创新型创业公司。
将门技术社群专注于帮助技术创新型的创业公司提供来自产、学、研、创领域的核心技术专家的技术分享和学习内容,使创新成为持续的核心竞争力。
将门创投基金专注于投资通过技术创新激活商业场景,实现商业价值的初创企业,关注技术领域包括机器智能、物联网、自然人机交互、企业计算。在近四年的时间里,将门创投基金已经投资了包括量化派、码隆科技、禾赛科技、宽拓科技、杉数科技、迪英加科技等数十家具有高成长潜力的技术型创业公司。
如果您是技术领域的初创企业,不仅想获得投资,还希望获得一系列持续性、有价值的投后服务,欢迎发送或者推荐项目给“门”:
bp@thejiangmen.com

点击右上角,把文章分享到朋友圈

扫二维码|关注我们
微信:thejiangmen
bp@thejiangmen.com
点击“❀在看”,让更多朋友们看到吧~