LiDAR产业研究:智能化军备竞赛开启,激光雷达集中上车
2021上海车展,华为冲击让每家车企和供应商感到震撼。华为直接和间接支持汽车智能化研发的工程师已超万人。汽车数字化转型所需的车端感知决策、网络通信、新能源三电、车外的云路网,车辆的研发和销售,除了生产华为几乎全部覆盖。
相比以前千人级研发投入(如百度),华为万人级研发军团的介入,极大加快了中国汽车产业的智能网联化升级步伐。当世界各国还在为抗击疫情烦恼时,中国从2021年开始,进入引领全球汽车智能网联化发展的时代。
以激光雷达上车为例,近期发布的配置激光雷达的新车型,主要以国内车企为主。
表:国内搭载激光雷达的新车型

来源:佐思汽研
4月14日,小鹏第三款量产车P5上市,最大亮点是搭载2颗大疆Livox激光雷达,可实现城市道路NGP功能。这是继蔚来ET7、长城摩卡、IM智己、上汽ES33之后,2021上半年国内亮相的又一款搭载激光雷达的新车型。
4月17日,搭载3颗华为96线激光雷达(分别安装在车头以及车头两侧)的ARCFOX极狐阿尔法S华为HI版也正式亮相;后续,长安方舟架构车型也将搭载华为激光雷达。
理想汽车的第二款车型,也将搭载激光雷达。
车载激光雷达经多年发展,技术路线和产品种类已相当多元化。佐思汽研梳理了其分类和构成,如下图所示。
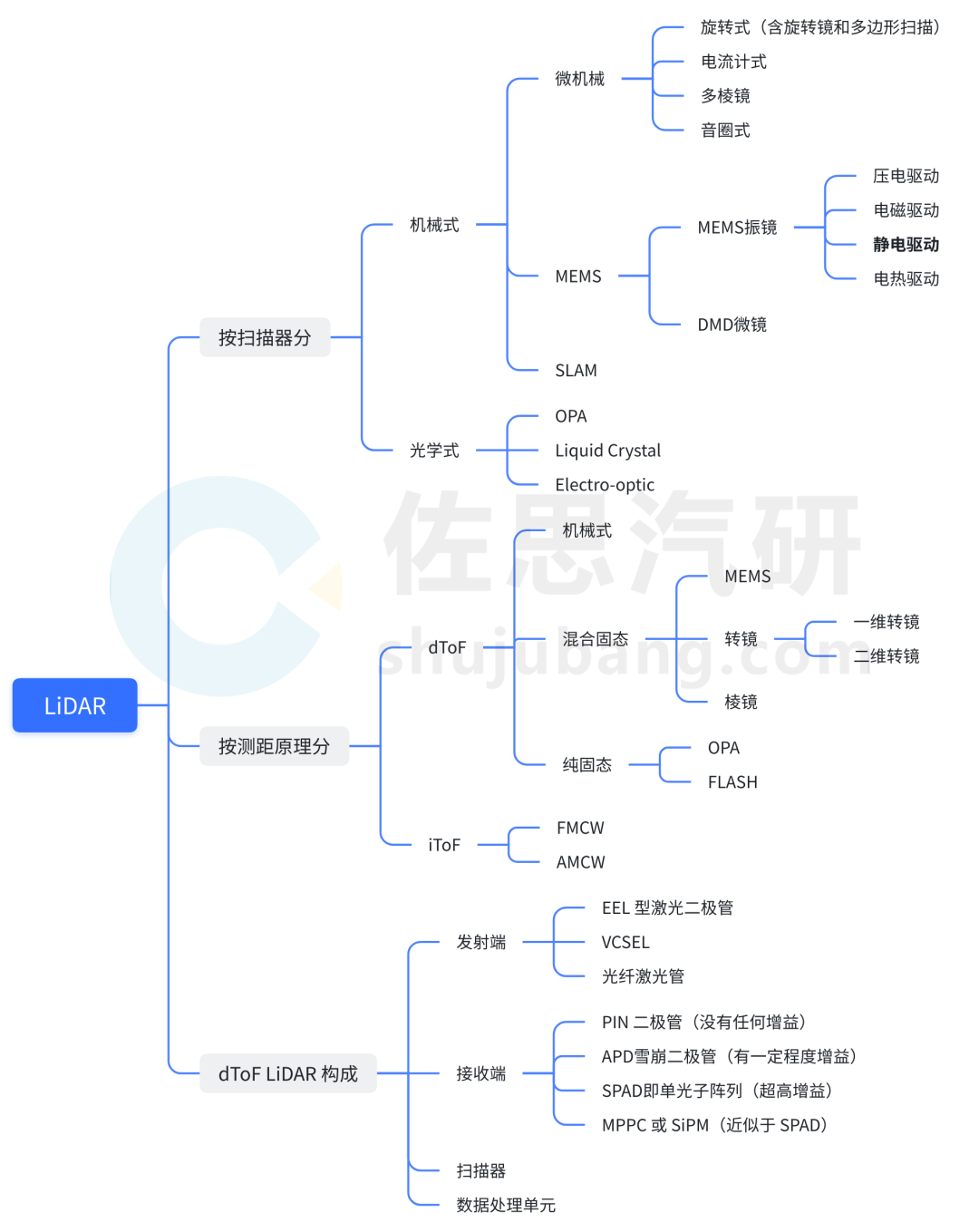
早期的激光雷达主要用于Robotaxi、Robotruck、Robobus、低速自动驾驶以及路侧感知等领域,但都处于小规模应用阶段,激光雷达真正放量还得看乘用车市场。
随着L4技术方案逐步应用到L2-L3车型,激光雷达也开启了批量上车的步伐。当前激光雷达在量产车上搭载,主要用于提升车辆ADAS功能,并为新车增添卖点。
迄今,国内主机厂选择上车的激光雷达主要采用混合固态(包括转镜、棱镜、MEMS)方案。究其原因主要有两点:
一是,混合固态较机械式激光雷达更易降低成本,同时与纯固态(OPA、Flash)相比,技术相对成熟,更易实现商业化落地。
二是,转镜方案(法雷奥为代表)是第一个过车规、成本可控,可满足车企性能要求,且实现批量供货的技术方案。
小鹏P5搭载的2颗激光雷达(安装在前保险杠两侧),来自大疆Livox定制版车规级 Horiz 浩界,采用双棱镜扫描方案,最大探测距离为150m(@10%反射率),横向视场角120度,角分辨率为0.16°*0.2°,点云密度等效于144线激光雷达。
图:小鹏P5搭载大疆Livox 定制版激光雷达Horiz

来源:小鹏汽车
小鹏Livox 激光雷达发射端采用905nm波长;接收端采用APD;扫描端采用双棱镜,即Risley prism universal pointing system,具备独特的非重复扫描方式。
图:大疆Livox双棱镜扫描方案

ARCFOX极狐 阿尔法S华为HI版 是首款搭载华为激光雷达的车型,分别在车头和车头两侧安装3颗华为96线激光雷达。
该款激光雷达于2020年12月发布,最大探测距离150m(@10%反射率),视场角为120°×25°,分辨率0.25°×0.26°。
结合其他传感器(6个毫米波雷达,以及13个摄像头与12个超声波雷达),可实现360°全覆盖。
图:华为96线激光雷达
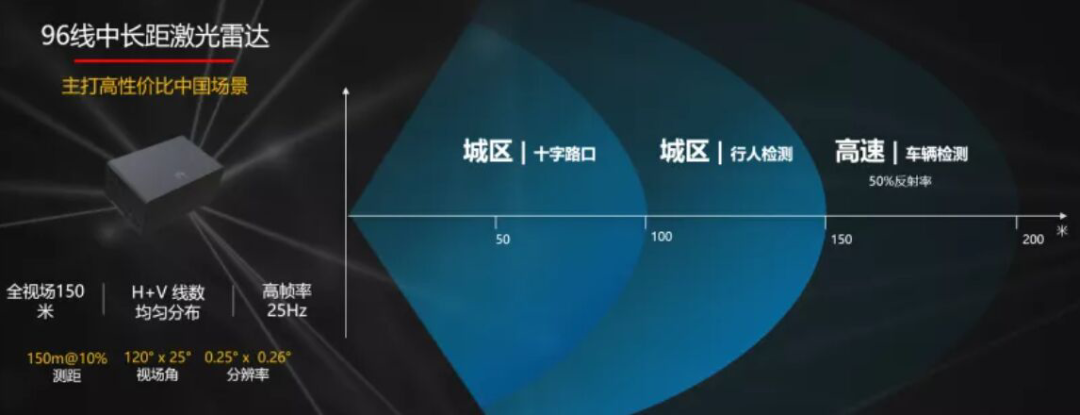
来源:华为
华为布局长、中、短距三大系列激光雷达,均采用转镜扫描架构,与法雷奥Scala 1、Scala 2相同,这也是通过车规并实现上车的方案。
图:法雷奥转镜方案拆解

来源:法雷奥
除华为、法雷奥外,Innovusion、Luminar 均采用了该技术方案,不同的是,后两者均为双轴旋转镜扫描,并即将在蔚来ET7和上汽R汽车ES33上量产。
图:上汽R汽车ES33搭载
Luminar 1550nm lris激光雷达

来源:上汽R汽车
Luminar 激光雷达具备独特的技术优势:发射端采用1550nm波长(主流905nm);接收端采用低成本的铟镓砷(InGaAs)探测器,集成自制第四代定制ASIC芯片;扫描端采用二维转镜扫描方式。
图:Luminar 激光雷达核心技术

来源:Luminar
Luminar基于此架构的Iris激光雷达,探测距离可达250m(@5%反射率) ,并可探测250m以外道路上很黑的物体;分辨率达300PPD,角分辨率为120°×30°。同时具备低成本优势。针对L2高级辅助驾驶用IRIS 的价格为500美元,针对L4/L5自动驾驶用则不到1000美元。
Innovusion 与Luminar的技术路径非常相似,均采用1550nm 波长,光纤激光器,以及双轴转镜扫描方案。
图:Innovusion双轴转镜扫描方案

2021年1月,蔚来ET7发布,搭载Innovusion 的Falcon激光雷达,计划于2022年一季度量产。
图:蔚来ET7搭载
Innovusion 1550nm Falcon激光雷达

来源:蔚来汽车
此外,速腾聚创的MEMS激光雷达RS-LiDAR-M1 也即将在Lucid Air 车型搭载。速腾聚创于2021年1月发布了RS-LiDAR-M1 SOP版本,将于2021Q2启动定点项目量产交付。
该款产品采用速腾聚创MEMS专利技术,最远探测距离200m(150m@10%),视场角120°×25°,分辨率为0.2°x0.2° 。
除速腾聚创外,采用MEMS技术方案的玩家还有Innoviz、AEye、Pioneer、禾赛科技、镭神智能、一径科技等,法雷奥第三代产品也基于MEMS技术打造。
其中,Innoviz的InnovizOne将于2021年搭载在宝马新型BMW iX上;法雷奥MEMS产品预计2022年前后开启量产。
表:MEMS激光雷达主要企业及代表产品

来源:佐思汽研
2021年全球与中国汽车激光雷达产业研究报告目录
本报告共370页
01
激光雷达概述
1.1 激光雷达简介
1.2 激光雷达的构成
1.3 激光雷达测距原理
1.4 激光雷达分类
1.4.1 机械式
1.4.2 半固态:MEMS
1.4.3 纯固态:OPA
1.4.4 纯固态:Flash
1.4.5 FMCW激光雷达
1.4.6 几种激光雷达技术对比
1.5 激光雷达主要技术参数
1.6 激光雷达产业链
1.6.1 上游
1.6.2 下游
02
激光雷达市场及趋势
2.1 应用领域
2.1.1 ADAS 和无人驾驶是激光雷达核心应用领域
2.1.2 ADAS 应用
2.1.3 Robotaxi 应用
2.1.4 Robotruck 应用
2.1.5 Robobus应用
2.1.6 无人配送应用
2.1.7 路侧感知应用
2.2 技术与趋势
2.2.1 激光雷达核心技术
2.2.2 主要企业技术方案梳理
2.2.3 主要企业核心产品技术方案对比
2.2.4 转镜/棱镜技术及应用
2.2.5 MEMS扫描技术及应用
2.2.6 VCSEL+ SPAD技术进展
2.2.7 FMCW技术进展
2.3 参与企业及产品
2.3.1 参与企业众多,产业整合加剧
2.3.2 多家企业借壳上市
2.3.3 融资成为企业生存常态
2.3.4 前装量产合作加速,本土厂商尤为突出
2.3.5 价格下探助力激光雷达上车
2.3.6 机械式相关企业及产品
2.3.7 半固态相关企业及产品
2.3.8 固态相关企业及产品
2.3.9 FMCW相关企业及产品
03
全球激光雷达生产商研究
3.1 Velodyne
3.1.1 Velodyne简介
3.1.2 Velodyne 成为领先的激光雷达公司
3.1.3 收入及净利润
3.1.4 收入结构
3.1.5 订单及计划
3.1.6 激光雷达生产及技术合作
3.1.7 Velodyne 激光雷达产品线
3.1.8 Velodyne车用激光雷达产品矩阵
3.1.9 Velodyne 固态激光雷达——Velarray
3.1.10 Velodyne 超近距离激光雷达——VelaDome
3.1.11 Velodyne 史上最小激光雷达——Velabit
3.1.12 Velodyne 最新固态激光雷达——Velarray H800
3.1.13 Velodyne 激光雷达核心技术
3.1.14 Velodyne 合作伙伴
3.1.15 Velodyne 与 Veoneer 合作
3.1.16 Velodyne 与 现代摩比斯合作
3.1.17 Velodyne 与 百度合作
3.1.18 Velodyne 发展动态
3.2 Luminar
3.2.1 Luminar简介
3.2.2 Luminar发展历程
3.2.3 Luminar营收及净利润
3.2.4 Luminar激光雷达解决方案
3.2.5 Luminar “Iris”激光雷达
3.2.6 Luminar “Iris”激光雷达量产计划
3.2.7 Luminar Hydra 激光雷达
3.2.8 Luminar 自动驾驶感知软件
3.2.9 Luminar 激光雷达核心技术
3.2.10 Luminar 激光雷达核心优势
3.2.11 Luminar 合作伙伴
3.2.12 Luminar 合作项目及计划
3.2.13 Luminar 发展动态
3.3 Innoviz
3.3.1 Innoviz 简介
3.3.2 Innoviz 发展历程
3.3.3 Innoviz 生产基地
3.3.4 Innoviz 产品及应用
3.3.5 激光雷达产品:InnovizOne
3.3.6 激光雷达产品:InnovizTwo
3.3.7 激光雷达感知软件
3.3.8 激光雷达核心技术
3.3.9 激光雷达合作伙伴
3.3.10 SPAC上市及业绩预测
3.4 Aeva
3.4.1 Aeva简介
3.4.2 Aeva 发展历程
3.4.3 主要产品及量产计划
3.4.4 核心技术
3.4.5 技术优势
3.4.6 应用市场
3.4.7 合作伙伴及客户
3.4.8 SPAC 上市计划
3.4.9 业绩预期
3.5 Ouster
3.5.1 Ouster 简介
3.5.2 Ouster 发展历程
3.5.3 Ouster 核心产品
3.5.4 Ouster 激光雷达产品
.................................
3.5.8 Ouster 核心技术
3.5.9 Ouster 竞争优势
3.5.10 Ouster 激光雷达应用领域
3.5.11 Ouster 合作伙伴及客户
3.5.12 Ouster 发展动态
3.6 Ibeo
3.6.1 Ibeo简介
3.6.2 IBEO 产品系列
3.6.3 Ibeo LUX 系列激光雷达产品
3.6.4 Ibeo 4D固态激光雷达 ibeoNEXT
3.6.5 Ibeo ibeoNEXT 技术亮点
3.6.6 Ibeo 合作项目
3.7 法雷奥
3.7.1 法雷奥简介
3.7.2 法雷奥激光雷达产品路线图
3.7.3 法雷奥SCALA1和SCALA2激光雷达性能对比
3.7.4 SCALA2激光雷达量产项目
3.7.5 法雷奥L3级Park4U泊车产品搭载激光雷达
3.7.6 法雷奥L4级Drive4U自动驾驶原型车搭载激光雷达
3.7.7 法雷奥与美团合作
3.7.8 法雷奥激光雷达主要客户
3.7.9 法雷奥发展动态
3.8 LeddarTech
3.8.1 LeddarTech 简介
3.8.2 LeddarTech 全球网络
3.8.3 LeddarTech 激光雷达产品及应用
3.8.4 LeddarTech 汽车LiDAR技术
3.8.5 Leddar Vision
3.8.6 Leddar Engine
3.8.7 LeddarTech LiDAR解决方案
3.8.8 LeddarTech 激光雷达数据集Pix Set
3.8.9 LeddarTech 合作模式
3.8.10 Leddar生态系统
3.8.11 LeddarTech 发展动态
3.9 Innovusion
3.9.1 Innovusion 简介
3.9.2 Innovusion 发展历程
3.9.3 Innovusion 系列产品
3.9.4 Innovusion 下一代激光雷达 Falcon
3.9.5 Innovusion 激光雷达技术
3.9.6 应用案例
3.10 AEye
3.10.1 公司简介
3.10.2 激光雷达iDAR 平台
3.10.3 激光雷达产品: AE100 和AE200
3.10.4 固态激光雷达—4Sight M
3.10.5 固态激光雷达—4Sight A
3.10.6 竞争优势
3.10.7 业务模式
3.10.8 合作伙伴
3.10.9 SPAC 上市
3.10.10 业绩预测
3.11 Quanergy
3.11.1 Quanergy简介
3.11.2 Quanergy 激光雷达产品
3.11.3 Quanergy 车载激光雷达解决方案
3.11.4 Quanergy M8
3.11.5 Quanergy S3
3.11.6 Quanergy S3汽车解决方案
3.11.7 Quanergy合作伙伴
3.11.8 发展动态
3.12 Cepton
3.12.1 Cepton简介
3.12.2 Cepton 核心技术
3.12.3 Cepton 主要产品及应用
3.12.4 Cepton Vista 系列激光雷达产品
3.12.5 Cepton Nova 激光雷达
3.12.6 Cepton 合作伙伴
3.13 Blickfeld
3.13.1 Blickfeld 简介
3.13.2 Blickfeld 激光雷达(1)
3.13.3 Blickfeld 激光雷达(2)
3.13.4 Blickfeld 激光雷达(3)
3.13.5 Blickfeld 技术
3.13.6 合作伙伴
3.14 Insight LiDAR
3.14.1 Insight LiDAR 简介
3.14.2 Insight LiDAR 核心技术
3.14.3 Insight LiDAR 主要产品
3.15 Sense Photonics
3.15.1 Sense Photonics 简介
3.15.2 激光雷达产品
3.15.3 核心技术
3.15.4 合作伙伴
3.16 Waymo
3.16.1 Waymo 简介
3.16.2 Waymo LiDAR 历程及产品
3.16.3 Waymo 短程激光雷达
3.16.4 Waymo 激光雷达技术
3.16.5 Waymo 激光雷达解决方案
3.16.6 Waymo 激光雷达发展计划
3.17 Mobileye
3.17.1 Mobileye 简介
3.17.2 Mobileye 激光雷达布局及计划
3.17.3 Mobileye 激光雷达解决方案
3.17.4 Mobileye 激光雷达技术
3.18 Aurora
3.18.1 Aurora 简介
3.18.2 Aurora 激光雷达产品FirstLight
3.18.3 Aurora 收购激光雷达公司
3.18.4 Aurora 收购激光雷达芯片公司
3.18.5 Aurora 激光雷达解决方案
3.19 博世
3.19.1 博世简介
3.19.2 博世激光雷达投资布局
3.19.3 博世车规级长距离激光雷达
3.20 大陆
3.20.1 大陆汽车介绍
3.20.2 大陆激光雷达业务布局
3.20.3 大陆激光雷达产品线
3.20.4 大陆3D Flash LiDAR
3.20.5 大陆SRL1
3.21 安波福
3.21.1 安波福简介
3.21.2 安波福激光雷达投资布局
3.21.3 安波福RoboTaxi传感器配置
3.22 Veoneer
3.22.1 Veoneer 简介
3.22.2 Veoneer 激光雷达产品
3.22.3 Veoneer 激光雷达布局
3.22.4 Veoneer 激光雷达客户
3.23 Xenomatix
3.23.1 Xenomatix 简介
3.23.2 激光雷达产品
3.24 Opsys
3.24.1 Opsys 简介
3.24.2 Opsys 主要产品
3.24.3 Opsys 核心技术
3.25 Infoworks
3.25.1 Infoworks 简介
3.25.2 Infoworks 产品
3.26 其他
3.26.1 SiLC Technologies
3.26.2 Bridger Photonics
3.26.3 Baraja
3.26.4 Pioneer
3.26.5 Cruise
3.26.6 采埃孚
3.26.7 LightWare
04
中国激光雷达生产商研究
4.1 禾赛科技
4.1.1 禾赛科技简介
4.1.2 禾赛科技经营情况
4.1.3 禾赛科技主要产品
4.1.4 机械式激光雷达Pandar 40/40P
4.1.5 机械式激光雷达Pandar QT
4.1.6 机械式激光雷达Pandar 40M
4.1.7 机械式激光雷达Pandar 128
4.1.8 机械式激光雷达Pandar XT
4.1.9 机械式激光雷达Pandar Mind
4.1.10 固态激光雷达Pandar GT 3.0
4.1.11 禾赛Pandora
4.1.12 禾赛激光雷达技术
4.1.13 禾赛合作伙伴
4.1.14 应用案例
4.2 速腾聚创
4.2.1 速腾聚创简介
4.2.2 发展历程
4.2.3 主要产品及解决方案
........................................
4.2.9 三维激光雷达Seeker
4.2.10 车规级固态激光雷达RS-LiDAR-M1
4.2.11 车规级固态激光雷达RS-LiDAR-M1 SOP版
4.2.12 激光雷达LCDF技术
4.2.13 感知算法软件
4.2.14 激光雷达解决方案
........................................
4.2.16 激光雷达合作伙伴
4.2.17 激光雷达应用案例
4.2.18 发展动态
4.3 华为
4.3.1 华为激光雷达布局
4.3.2 华为激光雷达产品
4.3.3 华为激光雷达技术
4.3.4 华为激光雷达解决方案
4.4 大疆览沃
4.4.1 Livox 简介
4.4.2 Livox 激光雷达产品
4.4.3 Livox 枢纽
4.4.4 核心技术
4.4.5 激光雷达解决方案
4.4.6 Livox 激光雷达应用案例
4.5 镭神智能
4.5.1 公司简介
4.5.2 发展历程
4.5.3 主要车用激光雷达产品
4.5.4 CX系列多线激光雷达
4.5.5 CH系列混合固态激光雷达
4.5.6 混合固态激光雷达核心技术
4.5.7 MEMS固态激光雷达
4.5.8 MEMS固态激光雷达核心技术
4.5.9 应用案例:自动驾驶
4.5.10 应用案例:车路协同
4.6 一径科技
4.6.1 公司简介
4.6.2 激光雷达产品及解决方案
4.6.3 激光雷达解决方案
4.6.4 合作伙伴
4.7 北醒光子
4.7.1 北醒光子简介
4.7.2 发展路径
4.7.3 主要产品
4.7.4 Horn-X2
4.8 北科天绘
4.8.1 北科天绘简介
4.8.2 发展历程
4.8.3 主要产品
4.8.4 R-Fans 激光雷达
4.8.5 C-Fans系列激光雷达
4.8.6 固态激光雷达核心技术
4.8.7 应用案例
4.9 万集科技
4.9.1 万集科技简介
4.9.2 研发和生产布局
4.9.3 核心技术和主要产品
4.9.4 主要客户及案例
4.9.5 发展战略和规划
4.10 力策科技
4.10.1 力策科技简介
4.10.2 力策科技产品及规划
4.10.3 力策科技核心技术
4.11 洛伦兹
4.11.1 洛伦兹简介
4.11.2 洛伦兹激光雷达产品
4.11.3 洛伦兹I/G系列
4.12 流深光电
4.12.1 公司简介
4.12.2 产品及解决方案
4.13 锐驰智光
4.13.1 公司简介
4.13.2 128线车规级激光雷达产品
4.13.3 32/64线激光雷达产品
4.14 探维科技
4.14.1 公司简介
4.14.2 核心技术
4.14.3 主要产品及计划
4.15 光珀智能
4.15.1 公司简介
4.15.2 产品及解决方案
4.16 光勺科技
4.17 洛微科技
4.18 未感科技
更多佐思报告
智能网联汽车产业链全景图(2021年3月版)
「佐思研究年报及季报」
「佐思研究月报」
ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报 | 车载信息系统月报 | 乘用车ACC数据月报 | 前视数据月报 | HUD月报 | AEB月报 | APA数据月报 | LKS数据月报 | 前雷达数据月报
报告订购联系人: 符先生 15810027571(同微信) 廖女士 13718845418(同微信)