浅谈自动驾驶仿真-场景库的那些事
以下文章来源于仿真秀App ,作者李慢慢
仿真秀App
提供专业仿真知识服务,搭建沟通桥梁,专注内容生产与分享


导语
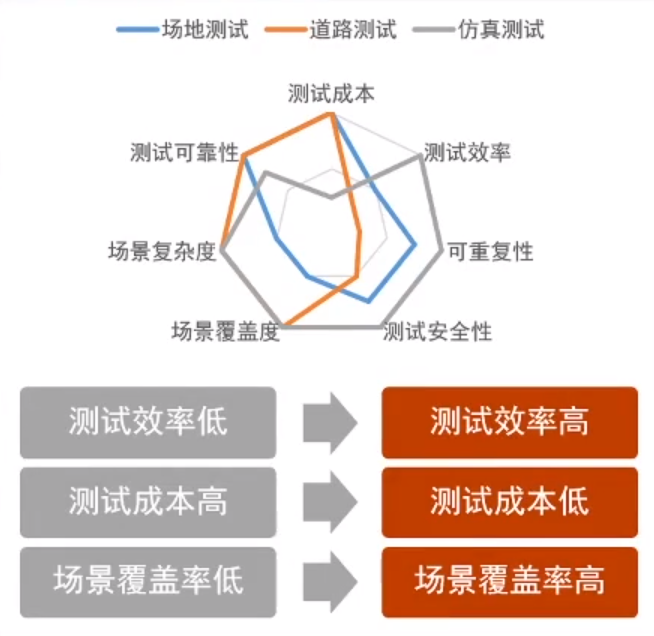
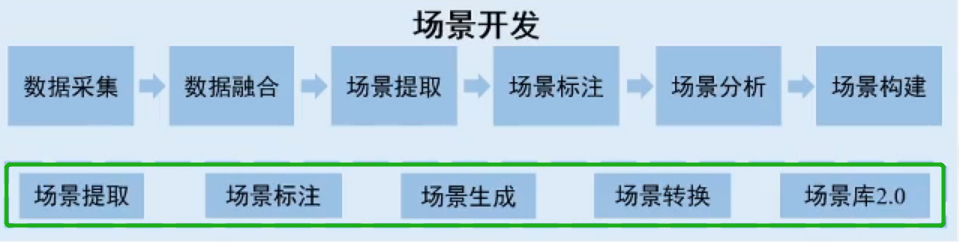
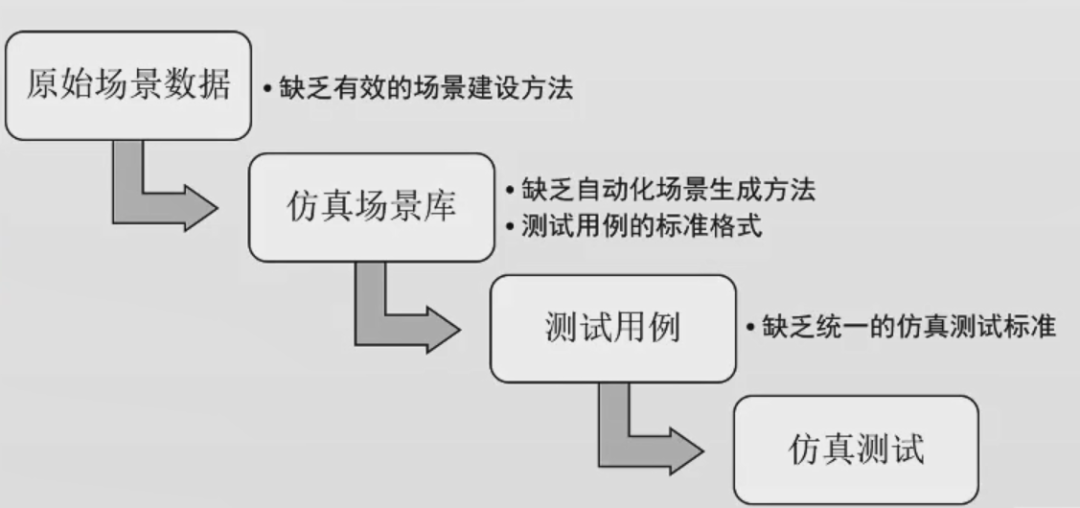
自动驾驶仿真有三个要素:场景库、仿真平台、以及结果评价。关于场景库的创建,学问很多:什么是场景库?为什么要创建场景库?车辆行驶场景无穷无尽,如何对其进行抽象提炼和归类管理?如何根据真实场景快速提取虚拟场景?如何利用场景库快速创建测试用例?如何定义场景库统一的标准?等等。这篇文章试图找到一些答案。


以下文章来源于仿真秀App ,作者李慢慢
提供专业仿真知识服务,搭建沟通桥梁,专注内容生产与分享
导语
自动驾驶仿真有三个要素:场景库、仿真平台、以及结果评价。关于场景库的创建,学问很多:什么是场景库?为什么要创建场景库?车辆行驶场景无穷无尽,如何对其进行抽象提炼和归类管理?如何根据真实场景快速提取虚拟场景?如何利用场景库快速创建测试用例?如何定义场景库统一的标准?等等。这篇文章试图找到一些答案。