ICCV'21 竞赛+workshop | 人机交互导航挑战赛
ICCV 2021 Workshop:
https://human-interaction4robotic-navigation.github.io/

随着深度学习和强化学习的发展,基于深度学习的导航应用也越来越可行。相比于传统基于规则的方法和SLAM,基于深度学习的导航方法有很多优点:深度网络能更好地识别图片,深度强化学习鲁棒性更高,可以接受自然语言指令等等。因为训练深度导航的模型需要大量的数据,研究人员们提出了很多虚拟环境来高效地采样数据,比如Matterport3D, Habitat,Gibson,AI2-THOR等等。
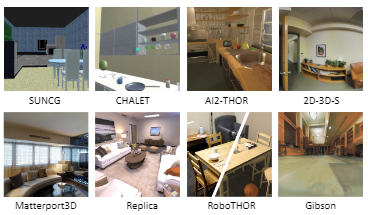 训练和测试导航模型的虚拟环境
训练和测试导航模型的虚拟环境
为了探究虚拟环境中的导航,研究人员基于这些虚拟环境提出了各种各样的导航任务,比如PointGoal,Object Goal,Room Goal 等等,通过给定一个点、物体或者房间作为机器人导航的目标。更近一步的,后来的工作提出了引入自然语言的导航,通过提供句子或者对话来指示机器人如何走到终点。
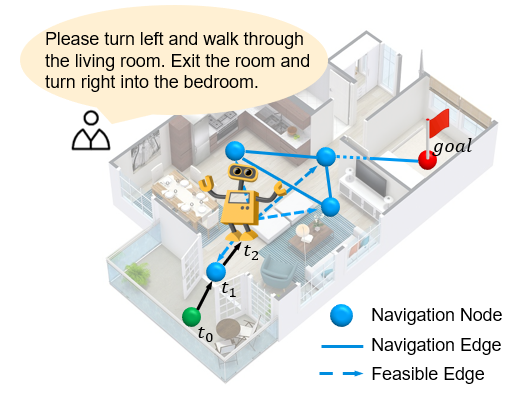 一个视觉-自然语言导航的示意图
一个视觉-自然语言导航的示意图
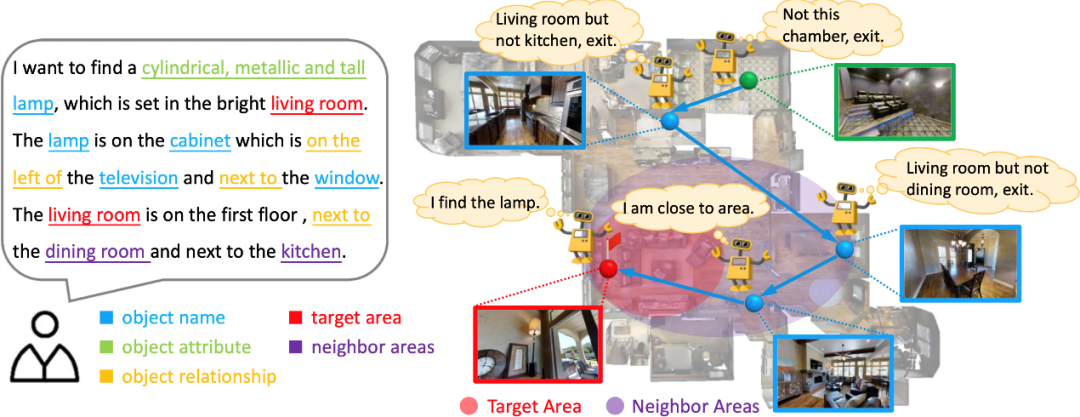

REVERIE 任务给定日常生活中高度抽象的简短指令,旨在让机器人找到一个远处的目标物体。
基于这两个数据集,我们发布了这个人机交互导航挑战赛。本次挑战赛分为两个分赛,SOON挑战赛和REVERIE挑战赛。目前两个挑战赛都已经正式上线。两个数据集都在同一个虚拟环境(Matterport3D Simulator)中运行。参赛者可以在比赛中提交结果,并将研究成果投至我们的ICCV Workshop (9月22日截止)。
SOON 赛事主页:
https://scenario-oriented-object-navigation.github.io/
REVERIE 赛事主页:
https://yuankaiqi.github.io/REVERIE_Challenge/index.html
https://eval.ai/web/challenges/challenge-page/1188/overview
RERVERIE结果提交地址:
https://eval.ai/web/challenges/challenge-page/606/overview
[1] Fengda Zhu, Xiwen Liang, Yi Zhu, Qizhi Yu, XiaojunChang, Xiaodan Liang. “SOON: Scenario Oriented Object Navigation withGraph-based Exploration.” CVPR 2021
[2] Yuankai Qi, Qi Wu, Peter Anderson, Xin Wang, WilliamYang Wang, Chunhua Shen, and Anton van den Hengel. 2020. “REVERIE: RemoteEmbodied Visual Referring Expression in Real Indoor Environments.” CVPR 2020

ICCV 2021 征稿啦!
想让你的工作获得更多关注?
想与更多大佬进行学术交流?
想宣传你主办的challenges或者workshop?
一键获取投稿方式!

本周上新!


扫码观看!
关于我“门”
