自动驾驶握紧人工智能边缘计算这张王牌才有更大赢面?
以下文章来源于北京市高级别自动驾驶示范区 ,作者示范区
北京市高级别自动驾驶示范区
大量传感器、海量数据、不断增长的计算能力、自动驾驶汽车所需的实时操作和安全问题,正将计算核心从云端推向网络边缘。自动驾驶车辆不断感测和发送有关路况、位置和周围车辆的数据。自动驾驶汽车每秒产生大约 1 GB 的数据,由于需要处理带宽和延迟,哪怕是将一小部分字节(TB)数据发送到集中式服务器进行分析也是不切实际的。
由于过高的数据传输量、延迟问题和安全性,当前的云计算服务架构延缓了为自动驾驶车辆提供实时人工智能处理的愿景。因此,作为人工智能主要代表的深度学习可以集成到边缘计算框架中。边缘人工智能计算解决了延迟敏感的问题,如目标跟踪和检测、位置感知,以及在云计算方式中面临的隐私保护挑战。

边缘人工智能实时决策和
准确预测的先决条件
边缘人工智能计算的真正价值只有在收集到的数据能够实现本地处理,且能够在不依赖远程资源的情况下实时做出决策和准确预测才能算真正体现。只有当边缘计算平台能承载预训练的深度学习模型,并且具有本地执行实时推断的计算资源时,这才可能发生。延迟和位置是边缘的关键因素,因为数据传输延迟和上游服务中断是引起无人驾驶汽车的安全问题的重要隐患(ISO26262)。例如,车辆上的摄像头传感器应该能在3ms内检测和识别周围环境,而不依赖云中的计算资源,且具有高可靠性(99.9999%)。对于速度为120km/h的车辆,1ms的往返延迟相当于车辆与静止物体之间的3cm位移或两个移动车辆之间的6cm位移。
目前,大多数用于自动驾驶车辆应用的车载AI计算任务(包括目标检测、分割、路面跟踪、标志和信号识别)主要依赖于通用硬件——CPU、GPU、FPGA或通用处理器。然而,对于自动驾驶和嵌入式应用程序,功耗、速度、精度、内存占用、模具尺寸和BOM成本都应考虑在内。由于冷却负载满足降温需求,GPU的功耗较高,这会显著降低车辆的行驶里程和燃油效率。针对封装、必须遵循风扇冷却和通用的做法。因此,需要更经济、更节能、更优化的人工智能加速器芯片,例如基于特定域人工智能的推理ASIC,用做加速边缘深度学习推理的实用解决方案。
人工智能汽车边缘计算的优势
车辆通信和5G V2X的进步现在可以在车辆和基础设施网络(V2I)之间提供可靠的通信链路。边缘计算最适用于带宽密集型和对延迟敏感的应用,如无人驾驶汽车,出于安全原因需要立即采取行动和作出反应。
自动驾驶系统极其复杂,集成了许多技术,包括传感、定位、感知、决策,以及与用于高清地图生成和数据存储的云平台的平滑交互。这些复杂性给自动驾驶边缘计算系统的设计带来了诸多挑战。
车辆边缘计算(VEC)系统需要实时处理大量的数据,通常有非常严格的能耗限制。因此,就必须提供足够的计算能力和合理的能耗,即便在高速行驶的情况也可以确保自动驾驶车辆安全。
为自动驾驶车辆设计边缘计算生态系统的首要挑战是提供实时处理、足够的计算能力、可靠性、可扩展性、成本和安全性,以确保自动驾驶车辆用户体验的安全性和质量。
车载边缘计算与车载云计算比较

低延迟
零(低)延迟对于汽车安全是必须保障的。众多自动驾驶汽车制造商都在设想,传感器数据将汇集云端,用于进一步数据处理、深度学习、培训和分析。这使汽车制造商能够收集海量驾驶数据,并能运用机器学习来完善人工智能自动驾驶。据估计,通过网络来回发送数据至少需要150-200毫秒。考虑到汽车正在运动,需要对汽车的控制做出实时的决定,这看起来并不长的时间在行车过程中着实过长。
据丰田公司称,到2025年,汽车和云端之间的数据传输量可能达到每月10EB,是目前的10000倍。云计算的设计速度不足以满足自动驾驶汽车对海量数据的处理。
自动驾驶汽车将在局部(边缘)级别实时执行车道跟踪、交通监控、目标检测或语义分割等对时间敏感的处理任务,并相应地采取驾驶行动。同时,对于长期任务,将传感器数据发送到云端进行数据处理,并最终将分析结果发送回自动驾驶汽车。
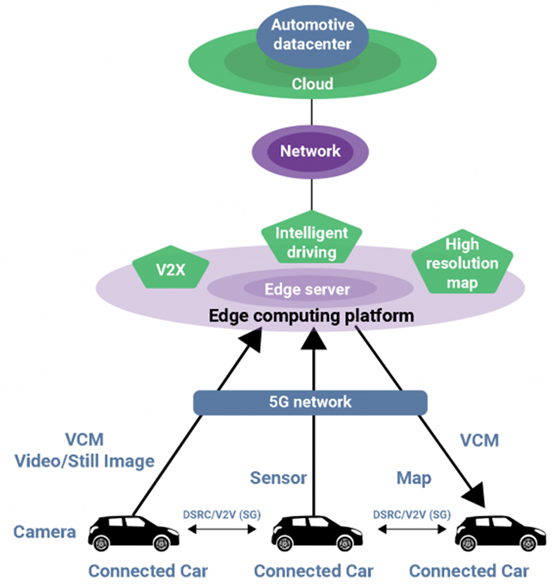
因此,边缘计算技术将提供一个端到端的系统架构框架,用于将计算过程分布到局部网络。一辆设计良好的人工智能自动驾驶联网汽车将是一个协作的边缘云计算系统、高效的视频/图像处理和多层分布式(5G)网络——本地化和云处理的混合。边缘人工智能计算是对云的补充,而不是完全取代云。
速度
考虑到在网络上来回传输的大量数据,出于安全原因,大部分处理必须在车辆上进行。由于依赖于连接性和数据传输速度,车辆在不需要传输数据的情况下需要计算连续数据的速度将有助于减少延迟和提高准确性。
人与机器之间的相互依赖性意味着信息的实时传输速度至关重要。使用边缘人工智能计算需要有足够的局部计算处理和内存容量,以确保自动驾驶汽车和人工智能处理器能够执行其所需的任务。
可靠性
自动驾驶汽车的安全性至关重要。边缘计算减少了阻塞的云网络的压力,并通过减少数据处理和车辆之间的延迟来提供更好的可靠性。未经多久,自动驾驶汽车制造商就意识到了云计算的局限性。虽然云是必要的,但自动驾驶汽车需要更分散的方法。
由于边缘计算和边缘数据中心的位置离车辆较近,因此在较远位置发生影响本地车辆的网络问题的可能性较小。即使在附近的数据中心出现故障的情况下,自动驾驶车辆的车载智能边缘推断也将继续有效地独立运行。
如今,汽车制造商为电力故障、网络故障甚至计算故障提供了多层保护和冗余。车辆还具有动态改变路线和供电网络流量的能力,甚至可以做出决策,让自动驾驶汽车安全停车。具有edge AI计算功能的无人驾驶汽车可以通过预测分析支持车载诊断,该系统可以在其生命周期内不断成长演进。
有如此多的边缘计算车辆连接到网络,数据可以通过多种途径重新连接,以确保车辆保留对所需信息的访问。有效将车联网(IoV)和边缘计算结合到一个全面的分布式边缘架构中,提供无与伦比的可靠性和可用性。
安全性
自动驾驶车辆设计边缘计算生态系统的终极挑战是为自动驾驶提供足够的算力、冗余和安全性,以保证车辆行驶的安全。因此,保护自动驾驶边缘计算系统免受感测和计算堆栈不同层的攻击是安全体系建设的重中之重。
自动驾驶车辆的安全性应覆盖自动驾驶边缘计算栈的不同层次,涉及传感器安全性、操作系统安全性、控制系统安全性和通信安全性。
此外,边缘网关的AI减少了通信消耗,减少了通信量,从而提高了数据安全性。
可扩展性
车辆边缘计算固有的分布式架构有助于将数据分配至网络边缘,车辆可实时分析和交互数据,与数据在本地操作并无二致。
虽然云是某些任务的必要条件,但自动驾驶汽车需要更分散的方法来降低延迟确保安全。例如,智能传感器可以分析各自视频源,确定需要注意的视频帧,并只将该相关数据发送到服务器。这种分散的架构减少了数据传输过程中的网络延迟,因为数据不再需要穿过网络到达云端进行即时处理。与过去相比,人工智能车辆配备了更多的车载计算能力,能够独立完成更多的任务。具有更高的可预测性和更少的延迟。
成本
越来越多的路侧单元(RSU)配置了强大的本地AI处理器,这有助于降低能耗、维护和运营成本,以及将数据传到云端的相关高带宽成本。与此同时,使边缘计算成为当今更可行的现实的关键驱动因素之一是,计算和传感器的成本持续下降。
人工智能汽车处理器技术
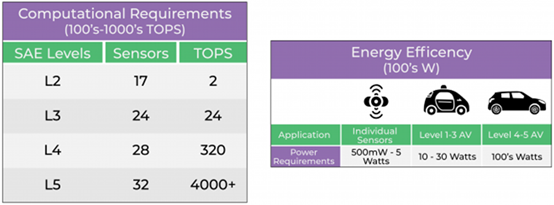
汽车工业正经历关键的技术转型,向更高的自动化水平迈进。智能驾驶需要更高效、更强大的人工智能处理器。根据Horizon Robotics对主机厂需求的总结,更高级别的自动驾驶需要更多数量级的TOPS,即L2级需要2 TOPS,L3需要24 TOPS,L4需要320 TOPS,L5需要4000多TOPS。
汽车处理器通常分为三大类:
基于CPU和GPU的处理器:灵活性越来越好,但通常功耗更高。
与GPU相比,FPGA需要更少的计算资源,但成本更高,编程能力有限。
ASIC:通常采用定制设计,在性能、成本和功耗方面效率更高。

传统的CPU和GPU努力满足L4和L5自动驾驶级别的高计算要求,其中FPGA/ASIC均优于CPU/GPU。自动驾驶汽车需要足够的算力才能成为"车轮上的数据中心"。考虑到汽车应用的复杂性,仅考虑算力是远远不够的,人工智能汽车处理器的能源效率、性能和成本效益也应考虑在内。因此全定制ASIC在更低功耗、性能和成本方面远优于GPU/FPGA。这也正是AI专用ASIC加速器在自动驾驶计算平台上的集成正蓬勃发展的重要原因。
文献参考:
https://www.ept.ca/features/autonomous-vehicles-ai-must-accelerate/
免责声明:本文系网络转载,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。