如何看待纯视觉自动驾驶(如 Apollo lite 和特斯拉)激光雷达是昙花一现还是必由之路?
我们要向大自然致敬,鸟类激发了人类飞行的愿望,骏马激发了人类疾驰的愿望,鱼类激发了人类潜水的愿望。但…
人类通过飞机、火箭实现了上九天揽月的梦想,而不是像鸟类一样扇动翅膀;
人类通过船舶、潜艇实现了下五洋捉鳖的梦想,而不是像鱼一样游动身体;
人类通过汽车、高铁实现了疾驰远方的梦想,而不是像走兽一样靠四肢奔跑。
所以,我们再回味这句话,就会有一些不一样的理解:
“人类靠视觉可以完成驾驶任务,为什么机器不行?”

一:特斯拉FSD究竟提供了什么样的自动驾驶方案
特斯拉虽然带起了视觉感知的浪潮,但从不断爆出的各类事故来看,这个功能并没有给人们带来想象中的体验。这不由得让我们疑惑,FSD究竟是一个怎样的自动驾驶方案。
为尽量准确,我们在特斯拉North America US官网、European UK官网、Middle-East Jordan官网,国内官网上查看官方描述。
我们可以发现特斯拉提供了4种自动驾驶功能:
自动驾驶辅助导航:自动驶入和驶出高速公路匝道或立交桥岔路口;
自动辅助变道:在高速公路上自动辅助变换车道;
自动泊车:一键式自动平行泊车或垂直泊车;
召唤功能:自动驶入驶出车位,听候“召唤”;
这几种功能只能算L2级别的辅助驾驶系统,在特定场景下提供某个方向(前进/左右)上辅助功能。
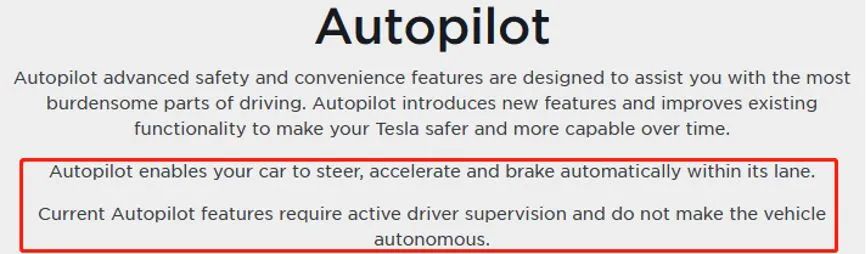
在autopilot官方页面,我们也看到了类似的描述,特斯拉明确指出Autopilot不是自动驾驶,它可以帮助车辆在车道内进行自动转向、加速和刹车。
据美国当地媒体披露的两封特斯拉在2020年底发给美国加州机动车管理局的信中,特斯拉首次承认,目前的测试软件并不适合完全自动驾驶操作。该公司表示,在未来某个未指明的时间点之前,不会开始测试“真正的自动驾驶功能”。
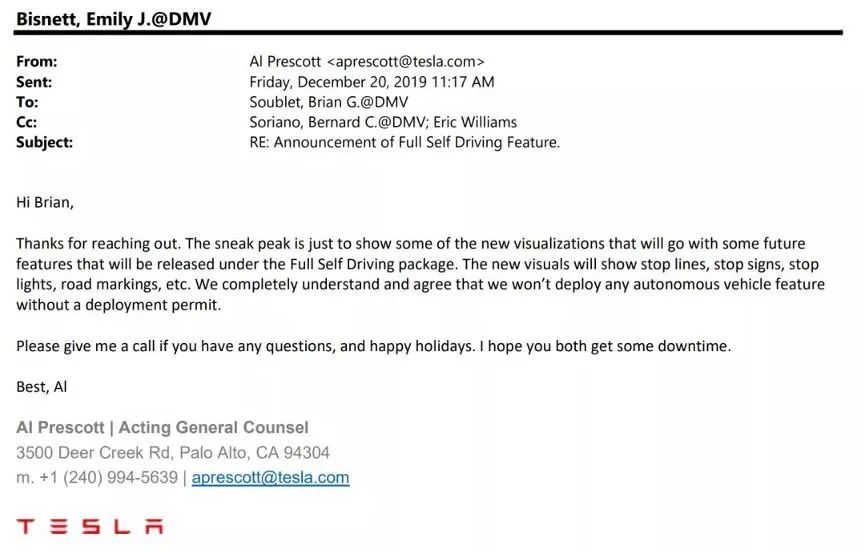
知情人士透露,在第一次回复问询中,特斯拉强调FSD测试软件的功能有限。比如,软件“无法识别或应对”“静态物体,比如道路碎片、应急车辆、施工区域、复杂的十字路口、任何遮挡、不利天气、密集车流的路端以及未绘制地图的道路。
随后,在第二次回复问询中,特斯拉补充称,“我们预计未来该功能将基本保持不变,短期内不认为会有重大改进,尤其是涉及到将整个动态驾驶任务的责任转移到系统”。
到此,我们再回味这句话:“人类靠视觉可以完成驾驶任务,为什么机器不行?”
我们可以大致理解马斯克的意思了,“人类靠视觉完成驾驶任务,机器使用摄像头可以让人类更好的完成驾驶任务。”
二:激光雷达能帮助解决什么问题
在特斯拉强调的FSD软件功能缺陷时,提到了一些corner case,如:“静态物体,比如道路碎片、应急车辆、施工区域、复杂的十字路口、任何遮挡、不利天气、密集车流的路端、鬼探头、不按交规行驶的摩托车等。
这些问题,从研发层面来说,是各种未解决的需求或者bug,但从消费者的角度来说,这些问题意味着FSD软件极大的危险性。
这些问题,都可以用激光雷达来解决。以北科天绘的C-Fans系列产品为例,在设计之初就考虑了这些因素。
00:38
无人驾驶-之眼ArgusC点云视频
1. 高分辨率 (0.1°×0.1°)

面对城市公路行驶过程中,远处不按交规行驶的行人,高速路上意外逆行的车辆,高分辨率的激光雷达可以解决目前毫米波雷达,视像头识检测碰到的各种问题,为决策规划系统提供稳定的感知输入。虽然激光雷达实时数据是稀疏点云,但C-Fans256线凭借其0.1°×0.1°的超高分辨率,能够在200m处的仍然实现0.4m×0.4m的网格密度,对于一辆宽1.8m,高1.8m的普通SUV而言,在200m处仍可以看到约4×4的点阵。
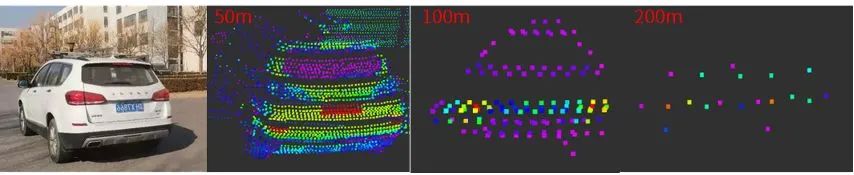
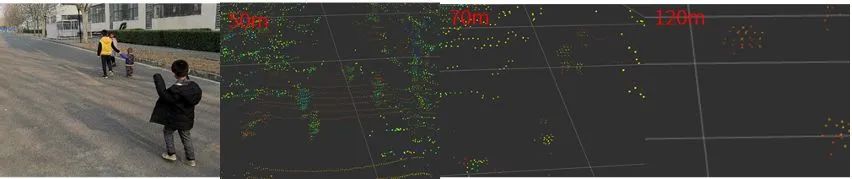
 图 3 C-Fans256对小障碍物实测点云(20cm×20cm×20cm)
图 3 C-Fans256对小障碍物实测点云(20cm×20cm×20cm)高分辨率对应高网格密度,可以实现更远更小的障碍物检测,在城市复杂路况下可以尽早的发现远处的细节变化,在高速行驶下可以提前发现远处的车辆的动作或异常,这样的检测能力就意味着更高的安全性。
2.大视场(150°×30°)
在十字路口无保护左转、城区复杂路口场景,大的FOV能够给自动驾驶车辆带来丰富的感知信息,特别是在完成U型掉头动作时,要求视场角越大越好,C-Fans256提供了150°×30°的FOV,可以在车辆左转或掉头时提供宽阔的感知范围,提高自动驾驶系统的安全性。
3.高帧频(80hz)
在鬼探头、高速汇入主路、高速急刹车等场景,激光雷达精确快速的直接轮廓测量能力可以帮助自动驾驶车辆在百毫秒内做出响应。此时的关键指标是帧频,如果鬼探头或者一辆突然急刹的汽车,相对速度是80km/h,如果雷达帧频是10hz,跟踪算法5帧完成计算,那就意味着,车辆的反应距离为:
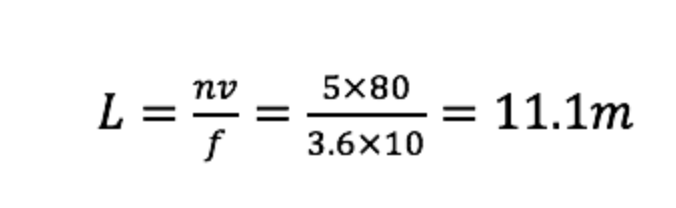
从出现意外到系统开始做出判断,两者的相对距离拉近了11.1m,再算上车辆的制动距离,这显然意味着危险系数的增加。
 图5不同帧频下车辆反应距离(80km/h)
图5不同帧频下车辆反应距离(80km/h)
这也是现阶段绝大多数自动驾驶车辆都在中低速、低动态变化场景下运行的一大原因,为尽可能提高自动驾驶系统的感知能力,C-Fans256将自身帧频提高到了业界闻所未闻的80hz水平,希望能为高速、高动态复杂环境下的无人驾驶的落地实现贡献自己的力量。
00:03
80Hz抓拍空中落下的高速物体
80hz高帧频,带来流畅快速的动态检测,在真实交通环境中,能够使得无人驾驶车辆的动态检测时间由百毫秒量级缩短到十毫秒量级,从而带来更高的安全性。
00:23
激光雷达-捕捉展示女孩动态舞蹈
4.灰度识别
L2的场景库必然是L3场景库的子集,如LCC车道居中辅助,ALC自动变道辅助、ACC全速自适应巡航、ATC自适应弯道巡航、LDW车道偏离等,使用激光雷达可以增强自动驾驶系统的在夜间、隧道出入口等场景的鲁棒性。
这些场景主要依赖传感器对车道线、路肩的准确检测,这对激光雷达的灰度识别水平提出了要求,要求灰度识别准确,精细。
C-Fans-256提供8bit的灰度分辨力,可以全天候实现清晰的车道线识别,提高无人驾驶系统的夜间感知能力。
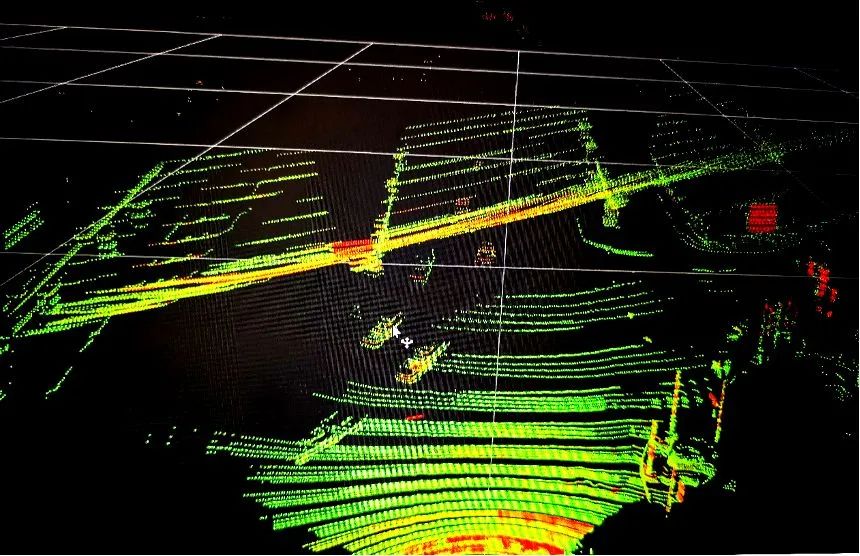
 图 8夜间车道线识别效果
图 8夜间车道线识别效果这不光是一个技术问题,还要考虑商业和营销,对于马斯克来说不仅要考虑功能方面的问题,还需要考虑营销及商业落地的速度。
面对辅助驾驶市场,特斯拉目前的这些功能已经足够满足使用需要,马斯克在一方面面夸大FSD功能,一方面拿视觉与激光雷达做比较,是在营销层面为其造势,加速其商业落地进程。
此外,激光雷达价格昂贵是马斯克不用激光雷达的主要原因,高峰时期,激光雷达甚至1线1万,这个价格显然无法满足量产上车的要求。
但随着这两年激光雷达的技术进步,激光雷达价格已经到了很普适的地步,北科天绘的C-Fans-256的上车价,目前已经远远低于市场价。


![]() 点击阅读原文,立即购买!
点击阅读原文,立即购买!
