北京工业大学论文丨基于改进型自抗扰控制器的永磁同步电机调试控制系统


感谢北京工业大学林家春老师团队供稿
1
基本信息
2
论文内容简介
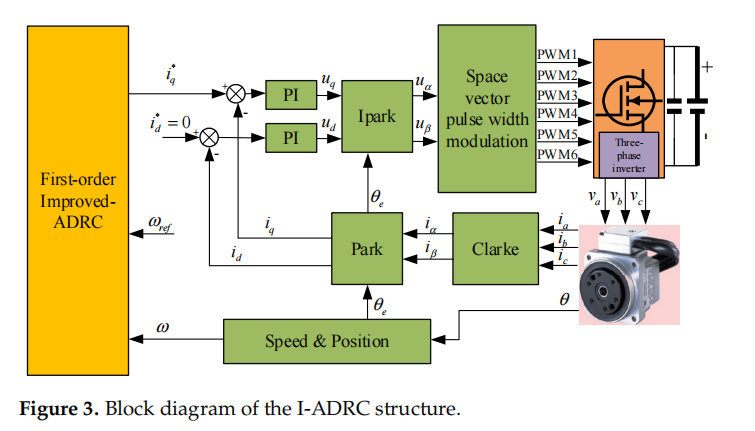
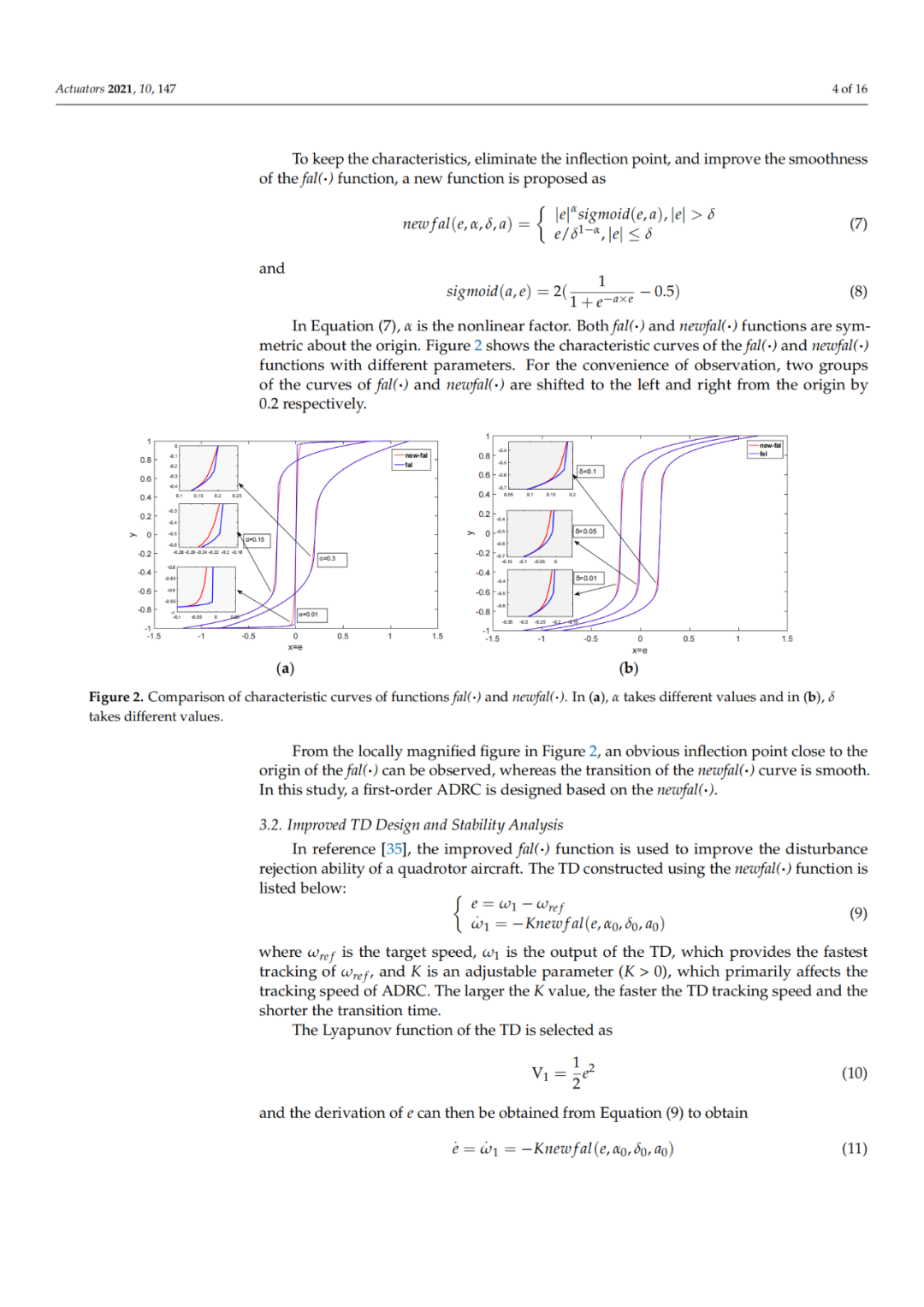
为提高永磁同步电机调速系统抗干扰能力,提出了一种基于改进型自抗扰的新型控制策略。首先,设计了一个平滑性更好的非线性函数,基于此非线性函数设计了改进型一阶自抗扰控制器。
然后,对改进型跟踪微分器、改进型扩张状态观测器以及控制系统的稳定性进行了李雅普诺夫稳定性分析,理论证明了改进型一阶自抗扰控制系统的渐近稳定性。最后,将改进型一阶自抗扰控制器代替调速系统中的速度环PI控制器,并进行了仿真验证和实验验证。
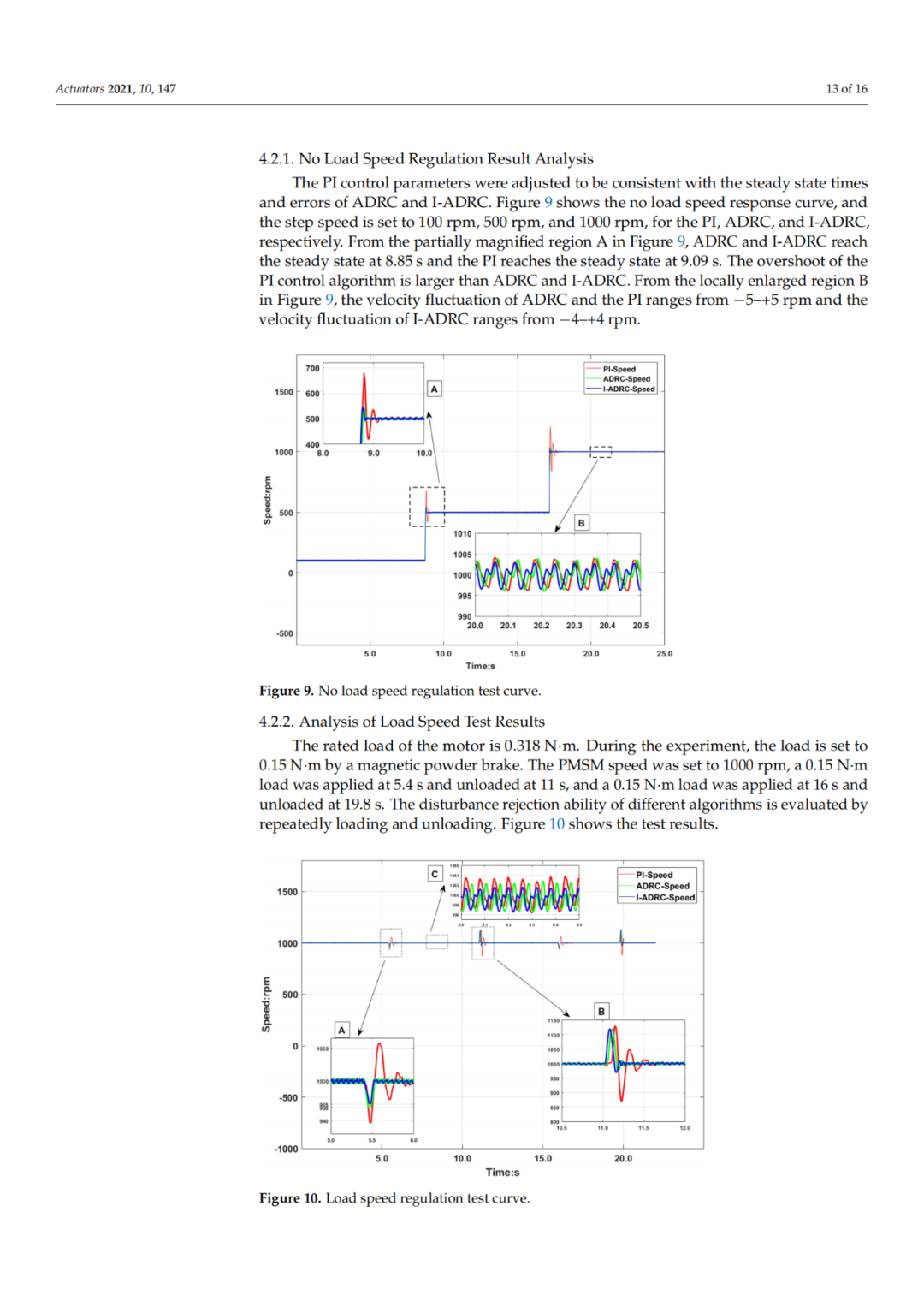
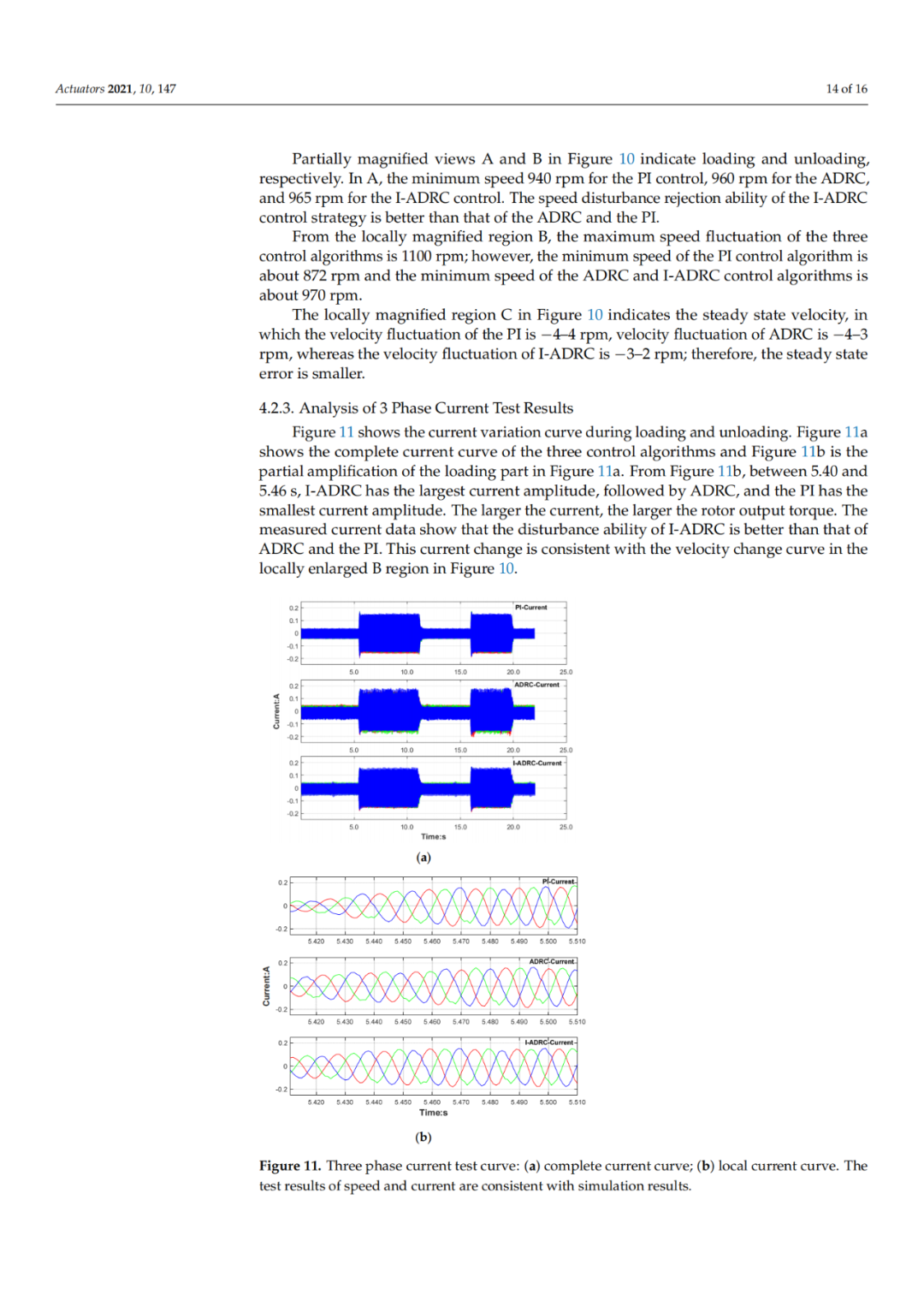
仿真和实验结果表明,相比PI控制器和非改进自抗扰控制器,改进型自抗扰控制器调速系统具有稳态误差小,抗干扰能力强的优点。实验结果表明基I-ADRC的PMSM调速系统在加载和卸载过程中,较ADRC和PI的PMSM调速系统表现出优良的稳定性,I-ADRC较PI和ADRC具有更强的抗干扰能力和鲁棒性。
3
研究背景
永磁同步电机具有结构简单、转动惯量小、动态响应快、功率密度高等优点。相比感应电机永磁同步电机转子采用永磁体,可以极大降低铜损。随着永磁材料、电子元器件性能的提升以及控制理论的发展,永磁同步电机广泛应用于数控机床、机器人、汽车、医疗、航空、航天等控制领域。

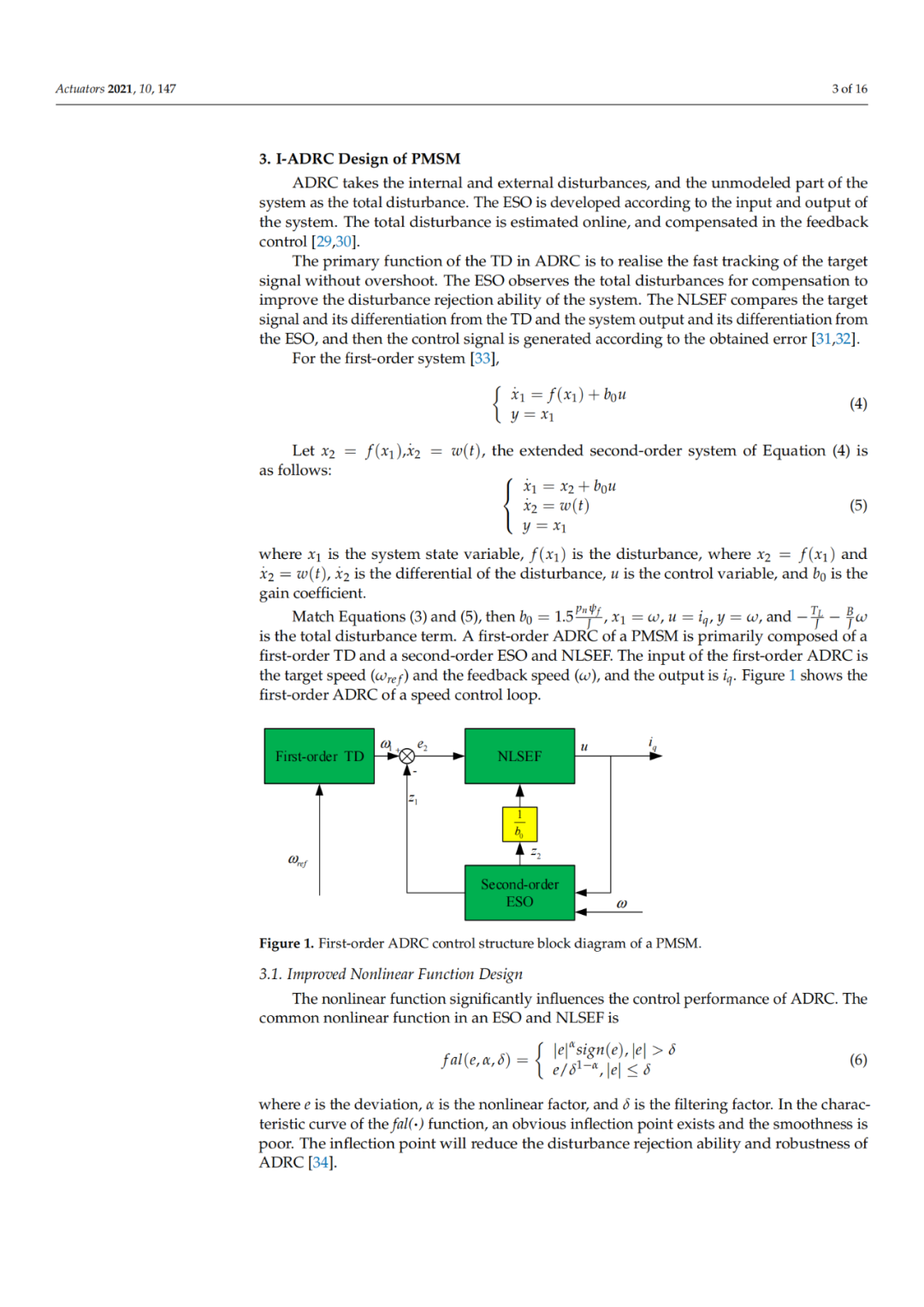
永磁同步电机控制系统中PI(D)控制方式使用最多,但调速过程中使用PI(D)控制器存在“快速”和“超调”无法调和的矛盾,抗干扰能力弱的问题。经典的PI(D)控制方式难以满足高品质的控制要求,国内外大量学者将自抗扰控制器应用到PMSM控制系统中,ADRC中的非线性函数对控制器的性能有一定影响,本文使用改进型的非线性函数提高自抗扰控制器的特性。
4
论文工程应用价值
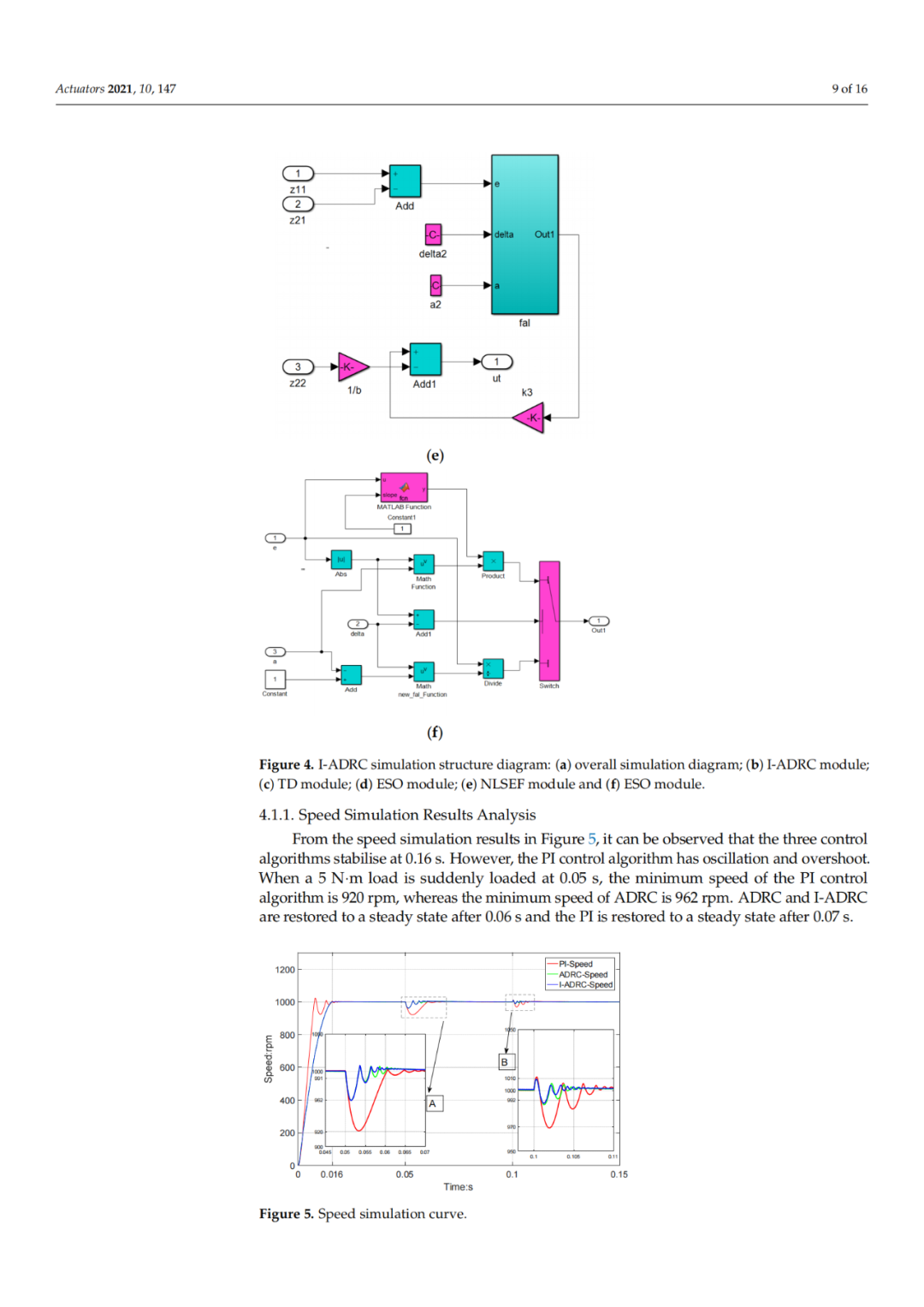
为了提高PMSM速度环抗干扰能力,设计了一个平滑性更好的新型非线性函数。根据此非线性函数,设计了PMSM速度环改进型一阶ADRC。并对改进型ADRC的一阶TD和二阶ESO进行了李雅普诺夫稳定性分析,理论证明了改进型一阶ADRC控制系统的渐近稳定性。为了验证改进型ADRC的速度环控制性能,将PI控制策略、ADRC控制策略、I-ADRC控制策略进行了Simulink仿真验证和实验验证。根据仿真和实验结果,进一步分析了三种控制策略加载、卸载过程中的速度、电流、转矩变化特性。结果表明基I-ADRC的PMSM调速系统在加载和卸载过程中,较ADRC和PI的PMSM调速系统表现出优良的稳定性,I-ADRC较PI和ADRC具有更强的抗干扰能力和鲁棒性。在1000rpm稳定运行时,突然施加1N.m负载,PI、ADRC和I-ADRC三种控制策略的最小速度分别为940rpm、960rpm、965rpm。
5
灵思创奇设备科研价值
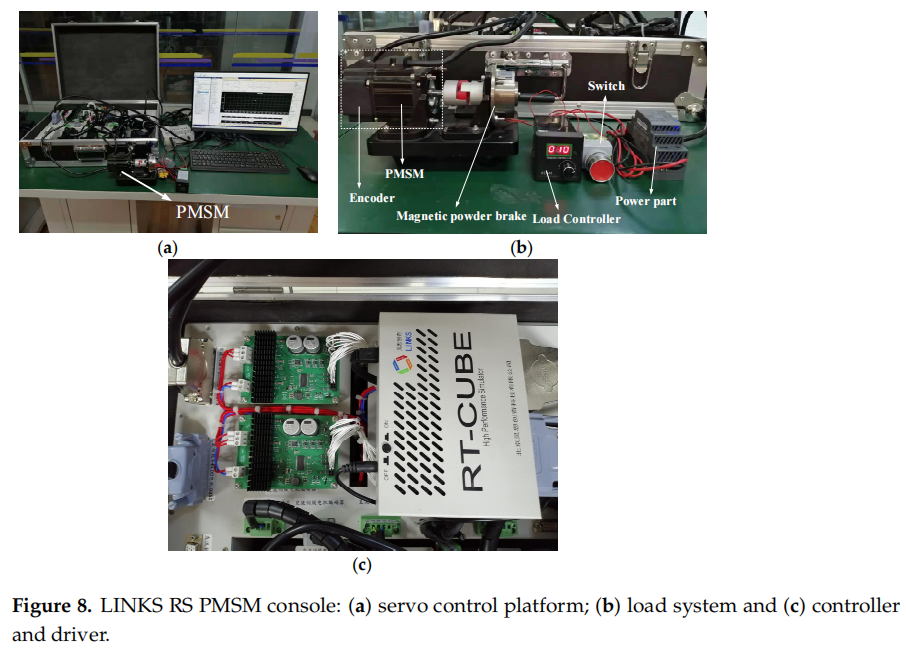
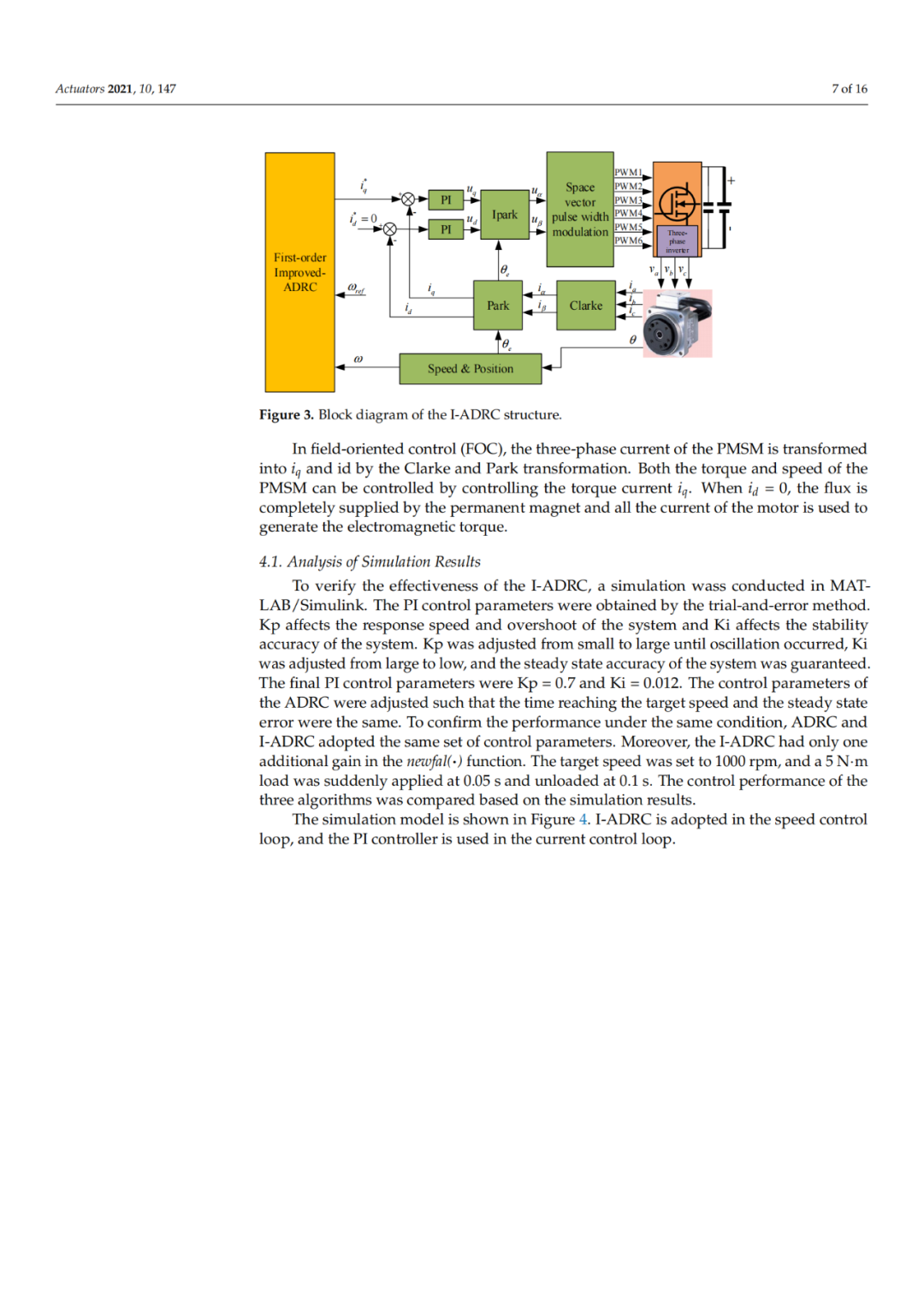
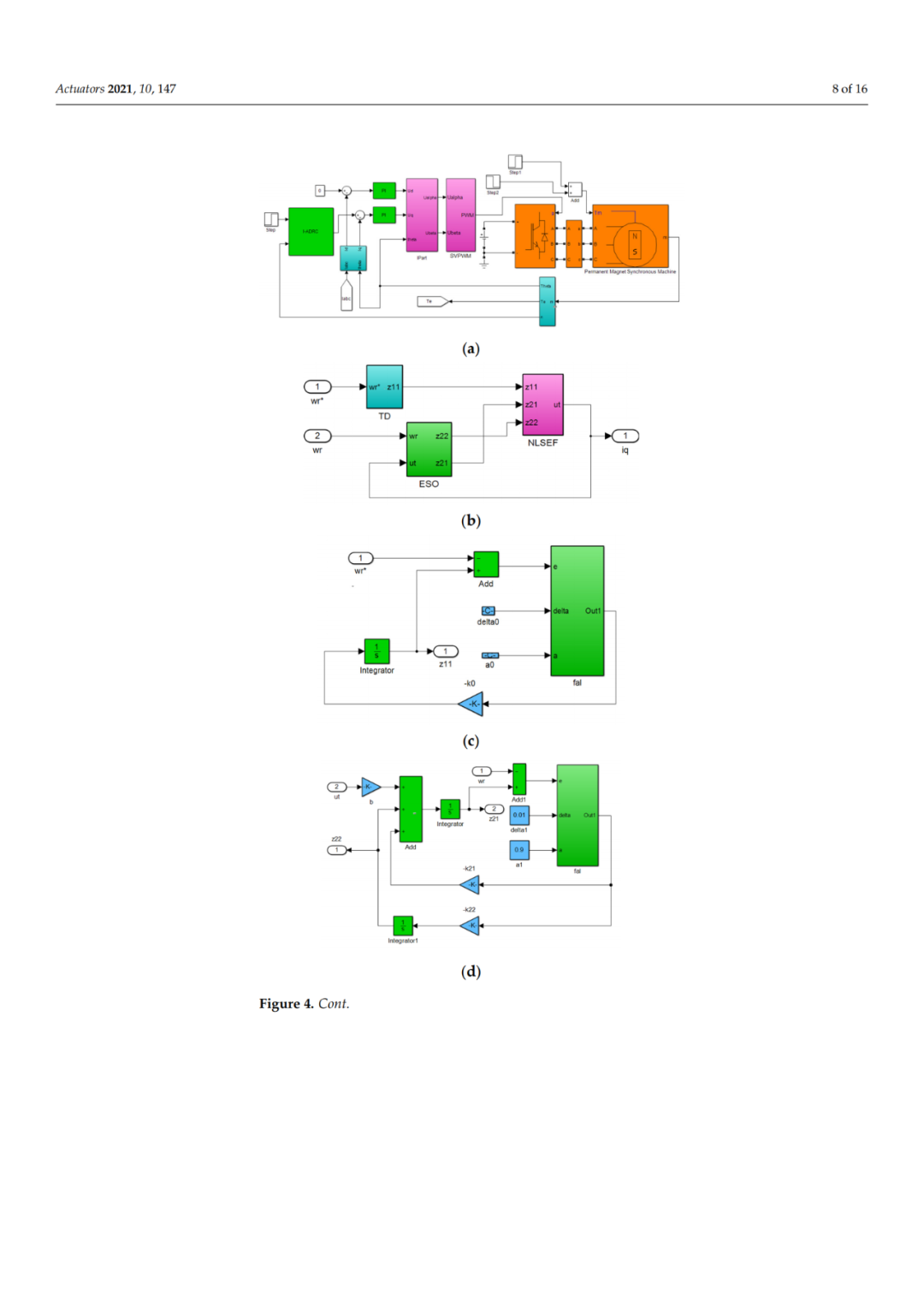
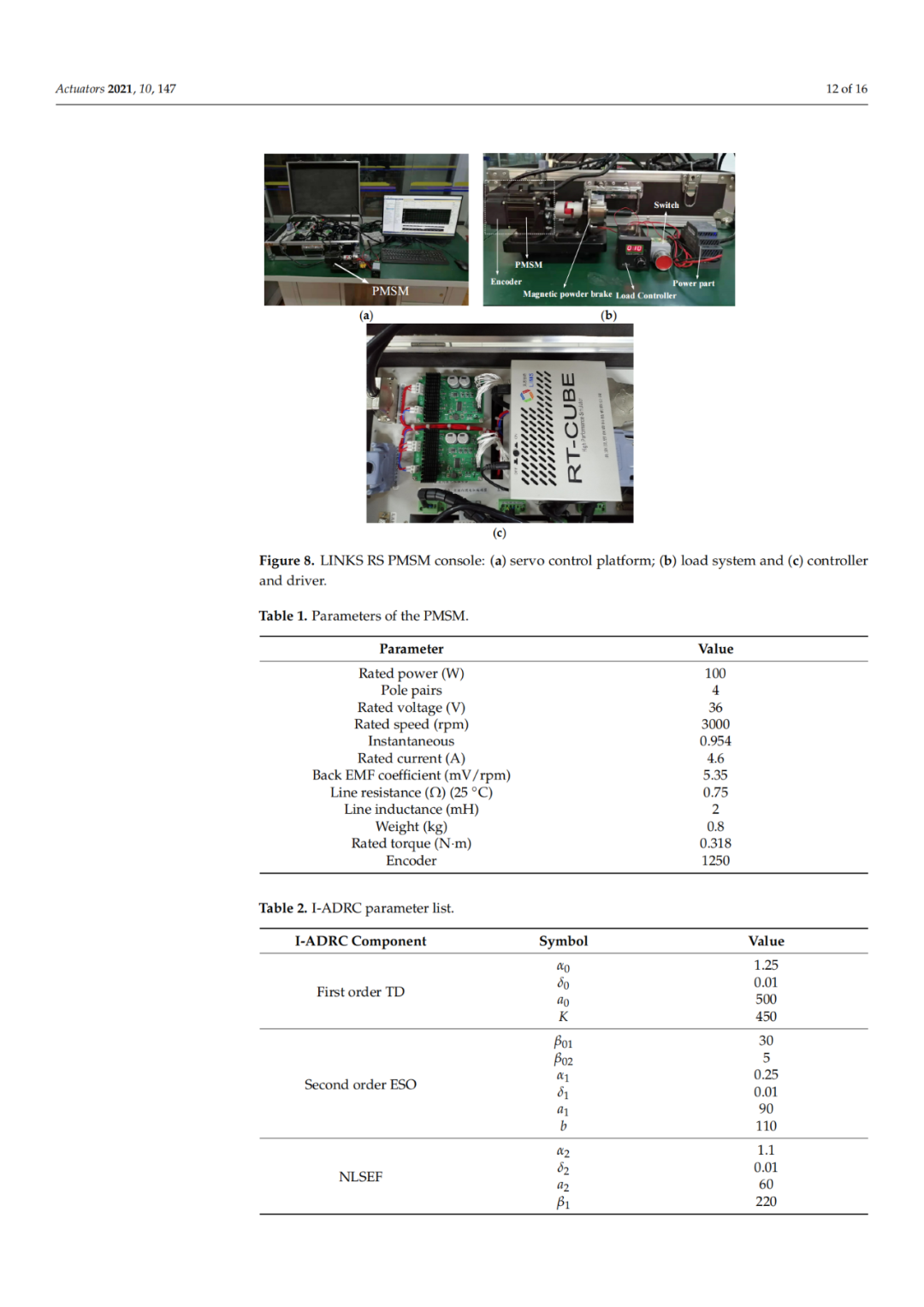
该在Simulink平台创建ADRC、I-ADRC模型,然后将该模型添加到灵思传奇的RT-Cube中,实现了使用ADRC、I-ADRC控制PMSM电机的运转。使用灵思创奇配套的磁粉制动器向PMSM突加负载,记录整个过程中速度的变化数据、控制电流变化数据、三相电流控制数据。将记录的数据导出,通过Matlab分析导出的数据,验证PI、ADRC以及I-ADRC三种控制方式的特性。

 论文内容
论文内容




 相关产品视频
相关产品视频


相关产品


相关阅读

北京灵思创奇科技有限公司
电话:010-5732 5131
传真:010-5732 5130
网址:www.linkstech.com.cn
微信公众号:LINKS-TECH
地址:北京市昌平区北控宏创科技园17号楼

