磁悬浮轴承——电力电子在高速旋转机械领域的应用
作者简介
本文是生活中的电、电源与电力电子科普征文大赛的二等奖作品,原标题《磁悬浮轴承——电力电子在高速旋转机械领域的应用》,作者:蒋栋,孙宏博,杨佶昌,刘自程,帅逸轩,来自华中科技大学,强电磁工程与新技术国家重点实验室。
01
# 磁悬浮轴承背景介绍
电动机想必大家都有所了解,转子“呼呼呼”旋转,带动工业的发展。在工业和国防领域,旋转机械是最重要的动力来源。无论是重工业中飞机发动机、船舶螺旋桨推进、汽车高铁的动力系统,还是生活里中央空调的压缩机,这些装置中都能看到旋转机械的身影。而在旋转机械中,轴承是一个非常关键的部件,它对旋转机械中的转子起到支撑作用。如果没有轴承,转子是无法在一固定位置自由旋转的。

轴承在工业和国防的重要性无可替代。在第二次世界大战中,德军迅猛的闪电战术依靠的大量战斗机与坦克,都离不开各类旋转机械中的滚珠轴承。英美盟军为遏制德军,采用了大规模空袭的方法,对施韦因富特的德国滚珠轴承厂进行打击,造成了德军装备轴承的严重短缺,直接影响了德军的作战能力,对战局带来了重要的影响。

图1.盟军轰炸德国滚珠轴承厂(来自网络)
目前工业界最广泛应用的是轴承类型是滚珠轴承。采用低摩擦的滚珠实现接触式支承。此外,滚珠轴承还需要加入润滑油进一步减少摩擦。但随着转速的提升,伴随着摩擦力的增加,这种接触式支承的方法在高速会遇到很多麻烦。另外在很多应用场合,为保证环境洁净度,润滑油被禁止使用。

相信大家可能有了些想法,既然接触式轴承存在的摩擦难以消减,那就尽量使用不接触的轴承呗。就是按照这样的想法,另外两种机械轴承被发明出来。一种就是箔片轴承(Foil Bearing),旋转中箔片与转轴中形成膜,可以脱离接触。另一种是气浮轴承,在轴承中通入压缩气体。当转子旋转到一定转速也可以实现与定子脱离接触。这两种方法相比于传统接触式的滚珠轴承具有高速运行条件下摩擦小的优点。但是一般都只适用于高速,且工艺也较为复杂,目前主要使用在特殊应用场景。

(a)滚珠轴承
(b)箔片轴承
(c)气浮轴承
图2.典型的几种机械轴承(图片来自网络)
与上述机械轴承不同,近年来发展起来的磁悬浮轴承采用可控电磁力实现对转子的无接触支承,可以适应从静止到高速的宽转速范围应用,且具有不加润滑油、无接触摩擦等优点。因此,磁悬浮轴承成为各类高端装备中旋转机械支承的新一代“领衔主演”
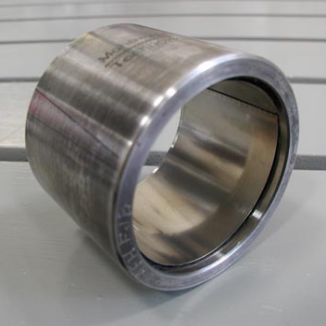
下方左图展示了一个典型的磁悬浮轴承的实物,本质就是一个电磁机构,通过产生可控的电磁力来实现悬浮。磁悬浮轴承的原理结构图如下方右图所示,主要结构包括控制器、传感器、功率放大器(驱动器)、绕组等。高端的装置,但其原理并不复杂。磁悬浮轴承的基本原理高中物理知识就能解释:每一轴的方向上,两侧绕组通过电流产生电磁力均能吸引转子。在一定的平衡状态下,两侧电磁力正好与这一轴的其他力平衡,转子在这一位置就能保持悬浮,而与定子没有接触了。

(a)典型实物
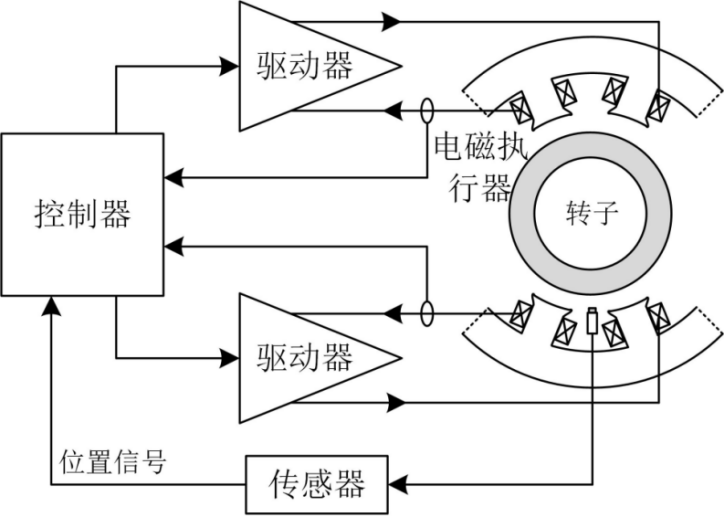
(b)原理结构图
图3.磁悬浮轴承的
从上图可以看出来,磁悬浮轴承是一种不稳定系统:当转子受到干扰向一侧偏移时,该侧气隙减小,磁吸引力增大。此时如果没有快速准确的电流控制,转子终会被这一侧电磁力吸引到极限位置,悬浮必然失效。

因此,磁悬浮轴承系统的电流需要根据转子此时的位置动态调节,比如转子偏下方时,上方电流需要增大,下方电流需要减小,上下两侧电磁力的差值将转子向上“托举”。动态调节实现的前提就是位置检测要足够快,且需要准确到检测微米级的微小位移。电流指令(小信号)是由控制器获知当前转子位置后做出的“决策”信号。有了“决策”信号,接下来需要“决策”的执行了。执行这一步呢,可以理解为将电流指令这一“比特世界”的量,变成绕组中真实的电流,该环节正是功率放大器的任务。产生的真实电流在绕组中流通后,电磁力将施加至转子,转子位置会发生变动。传感器再次采集转子位置信息,交由控制器产生电流指令,功率放大器产生真实电流,电磁力调整转子位置。如此往复循环,形成“闭环控制”,使得转子动态地悬浮在预期的位置。

事实上,图3是只有上下方位受控制的磁悬浮轴承原理示意图,真正的旋转机械应用中,转子一般需要在五个方位(即五自由度)上完成支承,其中包括四个径向和一个止推轴承。下图是一个典型的五自由度磁轴承系统示意图。为了支承转子,两侧各要一个平面的两轴径向磁轴承,每个平面包含一对图 3(b)所示的轴承控制两个正交方向的悬浮。而为了控制转子的轴向(z方向)位移,还需要一个加载在止推盘上的止推轴承。除磁悬浮轴承外,转子外围往往配备机械保护轴承。保护轴承主要用于转子失稳跌落时支撑转子,防止出现电磁机构等损坏,同时也用于在系统停机后对转子进行支撑。为了实现良好的支撑特性,磁悬浮轴承系统的控制是至关重要的。
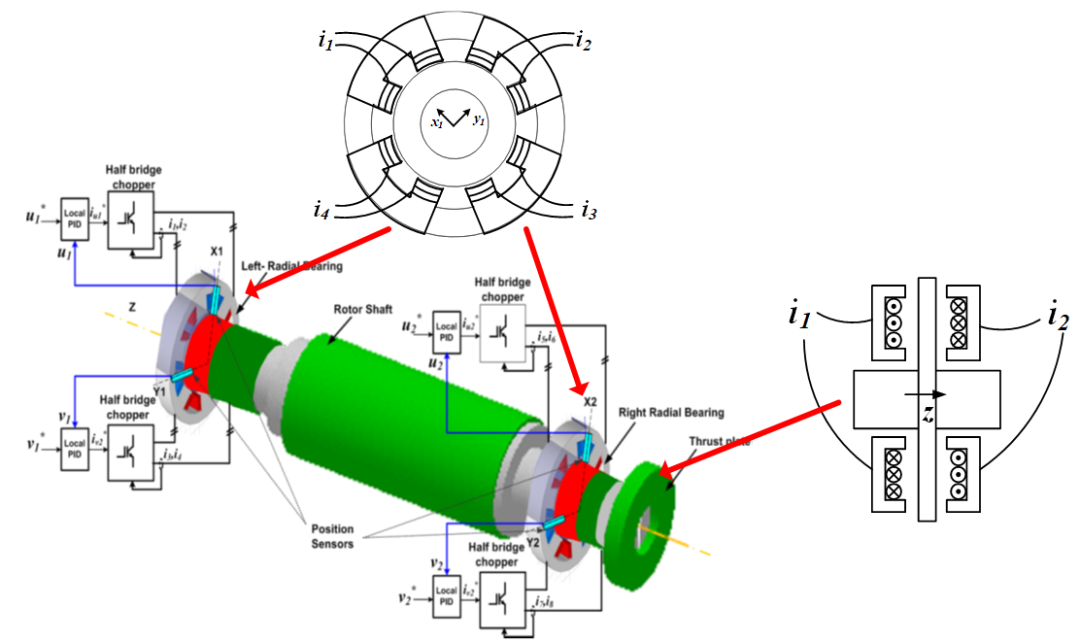
图4.五自由度磁悬浮轴承
02
# 磁悬浮轴承与电力电子技术
通过上述的介绍,相信大家对磁悬浮轴承有了一定的了解,可以看出,磁悬浮轴承是一个多学科交叉的领域,包括了力学,电磁学,传感器和信号处理,控制理论,以及电力电子技术等知识。其中,以电力电子技术为基石的功率放大器是磁悬浮轴承控制中一个重要的环节,是实现控制器中的“比特世界”转化为真实电流的执行机构。
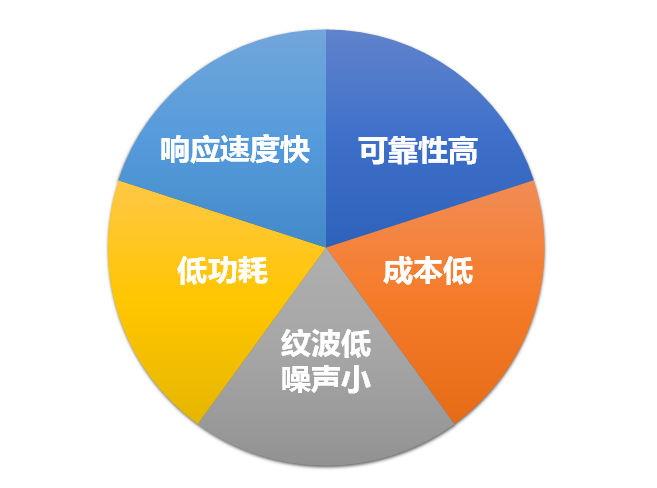
为了使磁悬浮轴承性能更好,电力电子控制器有一定的指标要求。首先是响应速度要足够快,这样才能很快响应位置波动;第二是要输出电流低纹波和噪声,这是为了保证电磁力的稳定;变换器还需要低损耗高效率,保证散热满足要求;进一步的,为求降低成本,变换器希望在保证性能的同时能用尽量少的器件;此外,当器件故障失效的条件下,能继续保持稳定悬浮,避免机组损坏等安全事故。

下面咱们从更深层次理解磁轴承工作原理。直观上就能看出,电磁力与控制电流和气隙相关。实际上,它们之间存在着较复杂的数学关系。为提高在电磁铁中电磁力关于控制电流与气隙的线性程度,方便控制模型的简化,首先需要通过电力电子变换器在绕组中注入直流偏置电流,将电磁铁中的磁场激励到稳定工作点。在此基础上根据电磁力增减的需求叠加控制电流。比如说,若偏置电流为5安培,当控制电流为1安培时,同一自由度正对的两个绕组电流分别为(5+1=6)安培和(5-1=4)安培,那么6安培绕组的作用力就大于对面4安培绕组的作用力,从而将这1安培控制电流的作用力效果加载在转子上。两绕组电流之和为10安培,即两倍的偏置电流。另外,磁轴承的电磁力是磁阻力。那什么是磁阻力呢?举个简单的例子,磁铁无论是N极端还是S极端均能吸引铁磁物质,电磁力的方向与极性无关。因此通入不同方向的电流,相当于形成N/S极端面向铁磁物质,极性不同,但电磁力均起到吸引作用,电磁力大小只与电流幅值相关,而我们日常接触较多的交流电机,其电磁力与电流方向有关。上述特点是磁轴承电力电子控制器与交流电机控制器原理上的主要区别。图5为磁场极性与电磁力方向示意图,图5(a)为磁轴承,通过控制绕组电流产生的电磁吸力使转子悬浮在中心位置,图5(b)为交流电机,在各个绕组中通入交流电流,产生的磁场在空间中旋转,其力矩带动转子旋转。
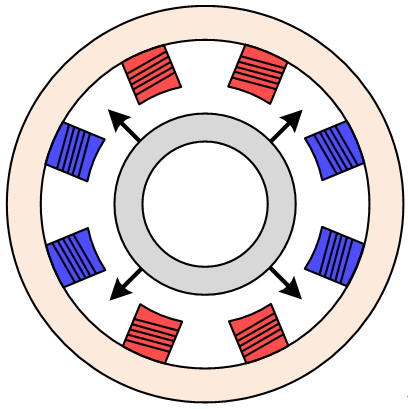
(a)磁轴承
(b)交流电机
图5.磁场极性与电磁力示意图
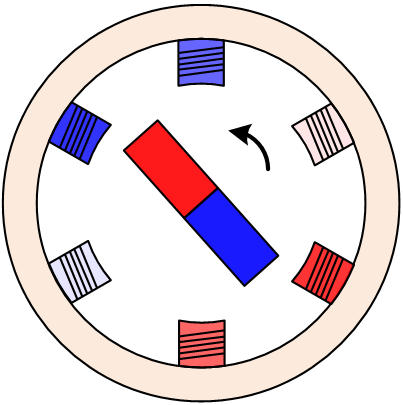
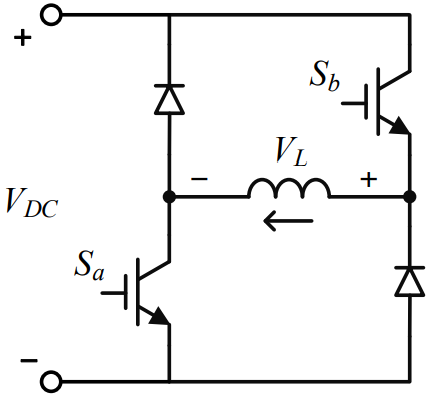
配合电力电子控制,磁悬浮轴承绕组电流都可以用图6的三种方式表征。磁悬浮轴承的每个绕组都可以等效为一个电感。在直流母线供电的条件下,开关管组合将直流母线电压正向加载在绕组上,绕组电流将快速增加(图6(a));如果开关管关断,绕组电流将通过反并联二极管反向接入直流母线,使负母线电压加载在绕组上,绕组电流快速下降(图6 (b));如果一个开关管导通而另一个关断,绕组电流则通过开关管与反并联二极管续流,加载在绕组上的电压接近零,绕组电流接近平稳(图6(c))。磁轴承系统在以(a)(b)为主要模态下能实现较高的动态性能,在以(c)为主要模态下可以保持较小的电流脉动纹波。
(a)快速增加电流
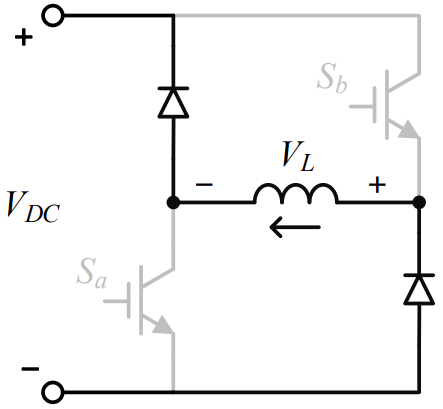
(b)快速减小电流
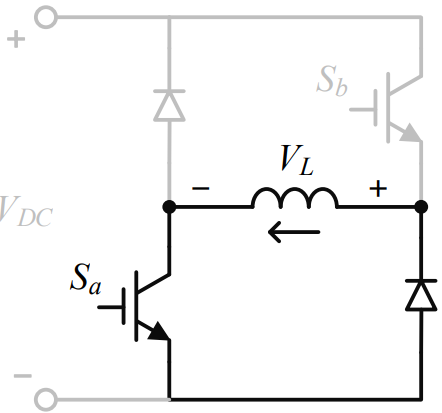
(c)续流
图6.磁轴承电力电子控制电流的基本组合
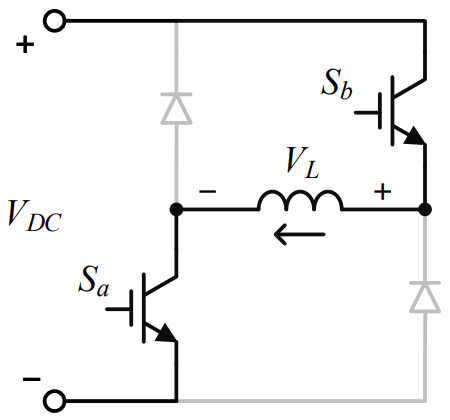
由三种工作模态演变出常见的磁悬浮轴承电力电子电路有以下两种。下方左图为“半桥”桥臂结构,通过开关管Sa与Sb的开通与关断,可以实现图6中各种模式的基本组合,实现电流的快速控制。从电压的角度来看,可认为是在绕组两端施加可控的电压,即0,VDC,-VDC三种情况。此外,上面提到过控制同一轴的正对的两个绕组电流满足相加之和为偏置电流的两倍,即为定值,因此可将正对的两个绕组按如图7(b)所示方式连接,两个绕组各有一端共同连接至中间桥臂,由中间桥臂控制该点的电位,此结构被称为“共桥臂”结构。与“半桥”结构相比,采用“共桥臂”结构时,每个自由度所需开关器件可减少,同时节省了开关器件的驱动电路等电气装置,整体装置体积也能得到缩减。
(a)半桥
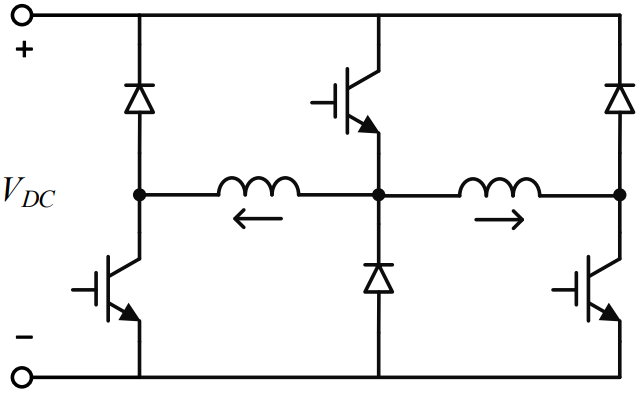
(b)共桥臂
图7.磁轴承电力电子功率放大器拓扑结构
之前提到,磁悬浮轴承的电磁力与电流方向没有关系,正向和反向的电流均能实现相同的电磁力,这样的特性为故障下实现容错控制提供了新的思路。在电力电子电路中,开关器件开路故障以及门极驱动信号丢失、门极驱动电路损坏是经常遇到的问题。当上述故障发生时,如果恰好转子处于高速运转状态下,那么转子必将发生高速跌落,发生撞击磨损甚至击毁机组结构等严重的安全事故。因此需要及时且精准地自动判断故障发生,并且采取相应的措施确保转子的不跌落运行。

幸运的是,现如今市场上基于全桥结构的电力电子功率模块存在冗余器件,这为容错提供了可能。以图8为例,图8(a)所示的结构为常见的三相全桥功率模块,可视作图8(b)和图8(c)所示的两个“共桥臂”结构的叠加。正常状态下,功率放大器工作于图8(b)模式,两个绕组电流之和为两倍的偏置电流;当开路故障发生时,两个绕组电流之和小于两倍偏置电流,以此为判断依据检测故障发生;控制器判断故障发生后,发出切换指令,将图8(b)模式切换为图8(c)模式,电流虽然反向,但并不影响电磁力的方向。基于以上机制,实现了开关器件开路等故障工况下的“容错控制”。
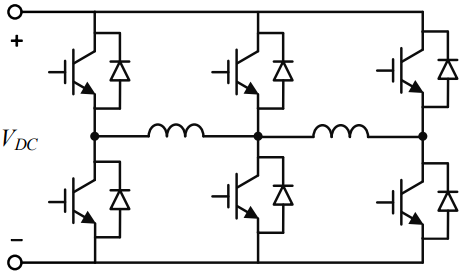
(a)三相全桥功率模块
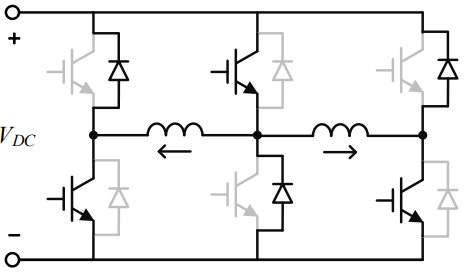
(b)正常模式
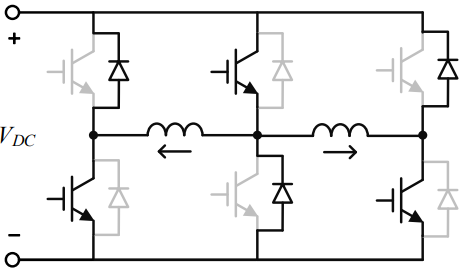
(c)容错模式
图8.磁轴承电力电子容错控制
03
# 磁悬浮轴承广泛的应用领域
在电力电子技术的推动下,磁悬浮轴承的技术日趋成熟,也开始广泛应用于各行各业。较早将磁悬浮轴承技术进行应用的案例为法国军方在1972年将磁悬浮轴承技术应用于卫星的姿态控制[1]。此后,磁轴承在航空航天领域的应用逐渐增多,并拓展至其他领域。目前主要的应用场合有:
(1)高速电机:磁悬浮轴承可以避免转子旋转时的摩擦与碰撞,转子容易获得较高转速。一个典型的案例是:2021年2月,美国Calnetix Technologies 公司开发了高速在线磁悬浮风机和双控制器产品,并将其应用于NASA下一代二氧化碳去除系统[2]。
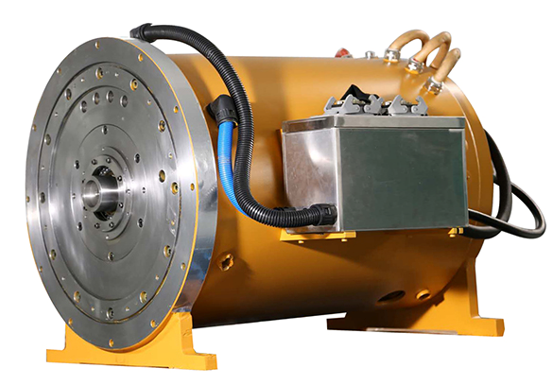
图9.磁悬浮高速电机(来自网络)
(2)离心式压缩机:压缩机是空调机组的核心旋转机械,磁悬浮轴承可以替代传统轴承的润滑剂及润滑装置,对压缩机制冷剂无污染。此外,磁悬浮轴承可以提高压缩机的运行效率,可节能48%左右。目前各大空调公司均有应用了磁悬浮轴承的压缩机产品。代表企业主要有丹佛斯,格尼斯,瑞士Mecos,日本精工、俄罗斯OKBM公司等。2019年,武汉地铁装配了格力公司推出的磁悬浮中央空调产品[3]。

图10.磁悬浮中央空调机组(来自网络)
(3)飞轮储能:飞轮储能的工作原理是利用电能驱动飞轮旋转,将电能转化为机械能储存起来,当需要将电能释放时,飞轮减速,机械能转化为电能。能量的存储和输出是通过飞轮的加速和减速实现的。飞轮快速旋转,不可避免会存在摩擦损耗,这时磁悬浮又能派上用场了。磁悬浮的无摩擦支撑特性可以显著降低飞轮旋转过程中的机械损耗,提高能量转换效率。2019年7月份,在北京地铁广阳城站,应用了磁悬浮轴承技术的兆瓦级飞轮储能装置正式实现了商用,填补了国内应用飞轮储能装置在解决城市轨道交通再生制动能量回收领域的空白[4]。
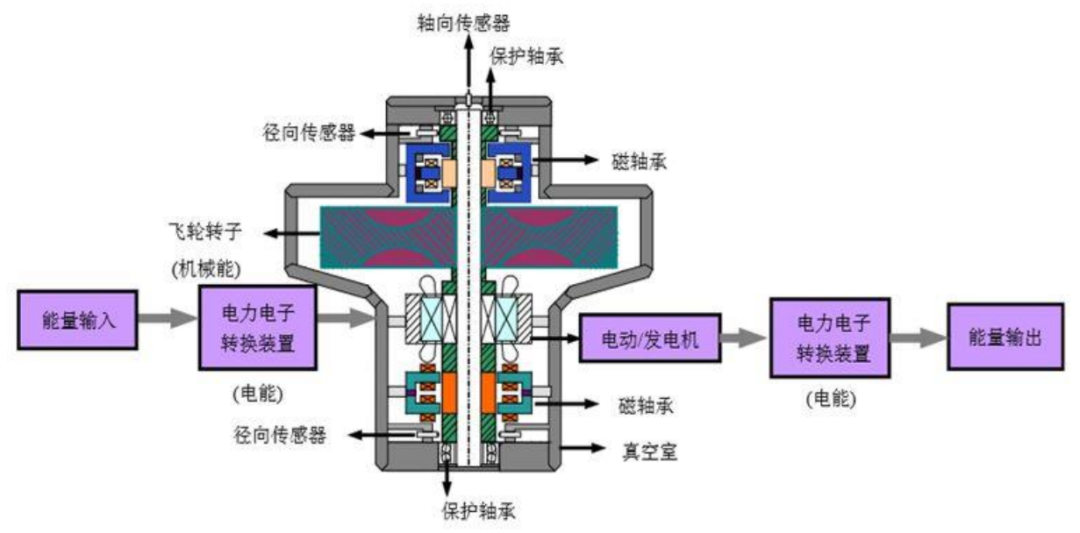
图11.磁悬浮飞轮储能系统(来自网络)
(4)人工心脏泵:心脏泵血功能的丧失或衰竭会使人体产生严重的疾病甚至危害生命安全。对于心衰患者的治疗,除采用心脏移植的方式外,另一种重要治疗方式为人工心脏泵。2020年疫情期间大家经常听到的ECMO也是类似的原理。磁悬浮人工心脏泵将磁悬浮技术与人工心脏泵结合,为人体血液循环提供动力,而磁悬浮的无接触支撑优势可以避免传统轴承对于血细胞的破坏,同时有效降低病人的心肌耗氧量,促进病人心脏机能恢复。2021年7月,华中科技大学同济医学院附属协和医院为31岁心衰患者施行体外磁悬浮人工心脏辅助手术,并于12天后成功实施心脏移植手术,是国内首个“体外人工心脏-磁悬浮体外左窒辅助装置”临床使用案例[5]。
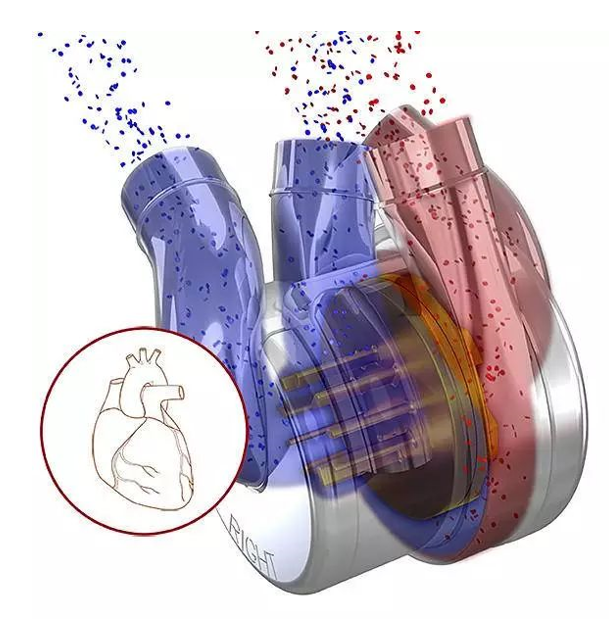
图12.磁悬浮人工心脏(来自网络)
除上述典型应用外,磁悬浮轴承技术还被应用于卫星姿态控制,电主轴机床加工等领域。磁悬浮轴承是未来智能机械的重要组成部分,具有无摩擦、无碰撞、不需润滑、可主动控制等优势。笔者相信磁悬浮轴承必将在工业、国防、医疗等领域扮演更为重要的角色。
参考文献
[1] Gerhard Schweitzer,Eric H.Maslen(著),徐旸,张剀,赵雷(译) .磁悬浮轴承——理论、设计及旋转机械应用〔M〕 .北京:机械工业出版社, 2013.147~179
[2] Calnetix Technologies Supplies Key Components for NASA’s Next-Generation CO2 Removal System | Calnetix Technologies
[3] https://home.163.com/15/1230/12/BC35MSPJ00104JV9.html
[4] http://sd.sina.com.cn/news/2019-07-09/detail-ihytcitm0790715.shtml
[5] http://www.chinanews.com/sh/2021/07-21/9524774.shtml

