1000TOPS,安霸挑战英伟达

安霸成立于2004年,核心团队均来自硅谷,创始人王奉民。安霸依靠GoPro运动相机一炮而红,并借助群光电子打入GoPro供应链,是GoPro独家芯片供应商。运动相机市场饱和后,安霸转入行车记录仪业务,后自2018年开始进军汽车ADAS前装市场,安霸2021年收入大约3亿美元,其中约15%来自汽车前装领域。目前已进入丰田高端雷克萨斯供应链,新兴造车企业Rivian也是安霸客户,此外还有现代汽车与安波福合资的Motional,与Uber合作打造无人车的英国新兴造车势力ARRIVAL。安霸自2022年开始进军L4级自动驾驶域控制器,首发芯片CV3。

图片来源:互联网
国内客户主要有吉利、长安、长城、上汽、宇通、比亚迪,合作项目主要是行车记录仪或DMS。
图片来源:互联网
图片来源:互联网
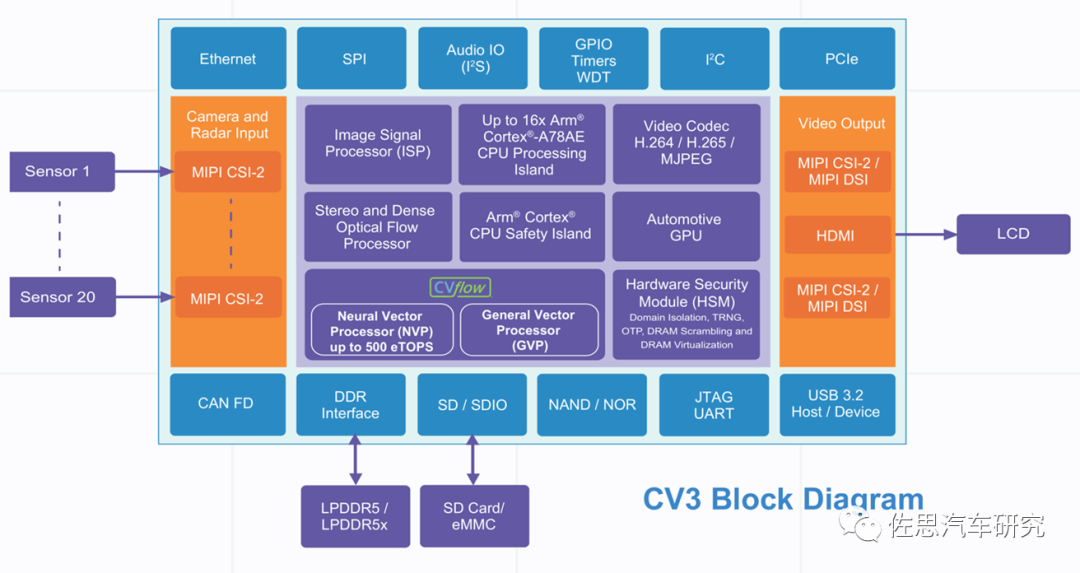
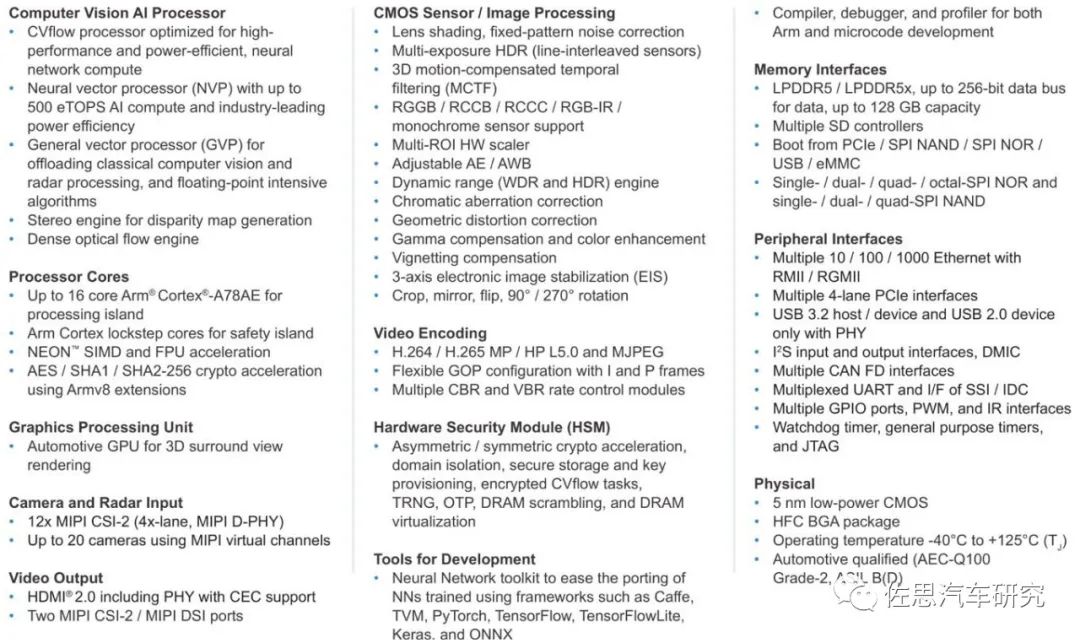
安霸CV3简介,采用三星5纳米工艺制造,比英伟达Orin的7纳米要高。运行温度范围最高上限达125℃,比Orin高20度。功能安全达到B级,加上MCU安全岛为D级。安霸晶圆代工合作伙伴一直都是三星,产能比较宽松,价格也最低。
图片来源:互联网
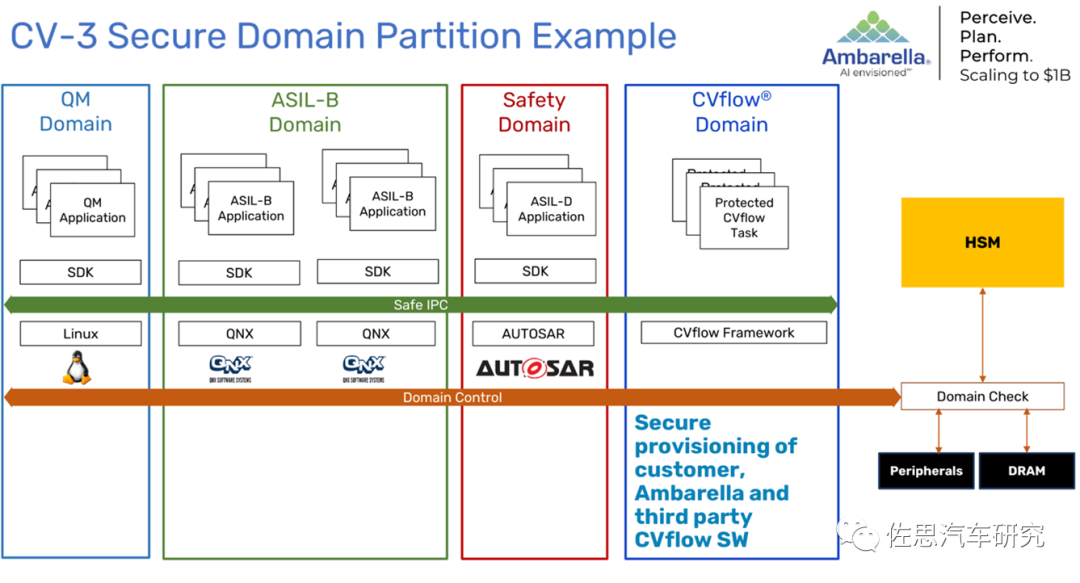
ASIL-B级主要就是决策部分,其底层采用QNX操作系统。安全域采用ARM的安全岛即Cortex R-52。域控制器层面采用硬件安全模块(HSM),这是安霸的特色之一。
HSM对于完全的安全车载通信 (SecureOnboard Communication, SecOC) 是必不可少的。HSM有助于确保所收到的所有数据的真实性,并防止攻击者通过绕过与安全性相关的ECU接口,获得对中央处理器甚至车载网络的访问权限。然而,集中式车载网络所面临的挑战不仅限于此:每当车辆计算机(通常划分为多个虚拟机)接管多个ECU的软件应用程序和功能时,对安全组件的需求也会增加。新一代的HSM也为此做好了准备。物理上,HSM的安全功能封装在相应处理器的HSM内核中。在那里,安全功能通过HSM软件协议栈激活和操作。因此,车辆计算机的主控制器可以专注于其实际任务,而HSM内核则处理安全性的要求:安全的车载通信、运行时的操作检测以及安全的启动、刷新、日志记录和调试。这使HSM比纯粹基于软件的安全解决方案要强大得多。
新一代的HSM将具备一个精简的实时操作系统,或者称之为固件。新的HSM固件可确保HSM内核最多处理16个并行会话,而HSM软件中的会话数量可配置。这种多核和多应用程序支持的秘密在于HSM固件驱动程序的特殊体系结构。这允许不同的虚拟化应用程序独立集成驱动程序,从而为独立开发各种软件部件铺平了道路:在集成过程中,“链接器”步骤可确保驱动程序的各种实例在硬件的共享RAM中使用通用结构。新一代HSM设计用于多核和多应用程序任务,使用批量MAC接口,即使在高数据负载和异构格式的情况下,也可以确保通信的实时性。
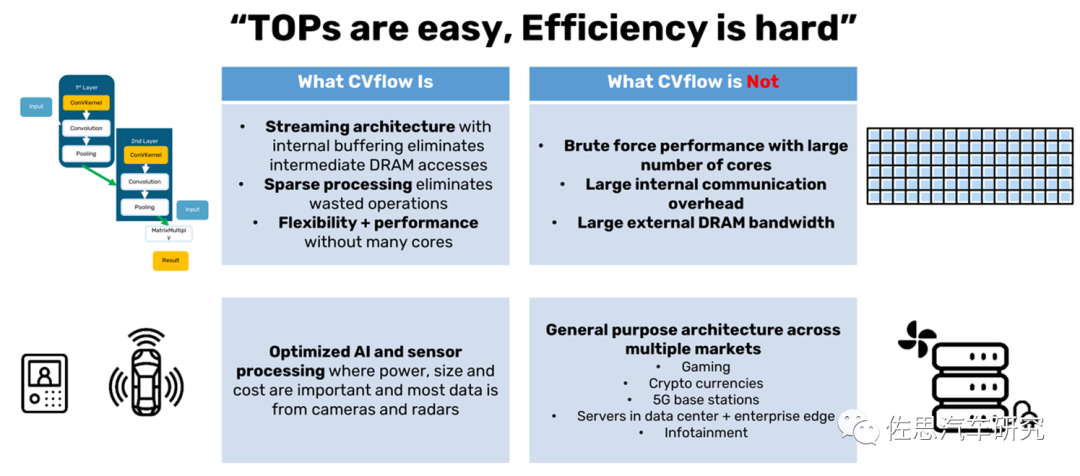
安霸的AI加速器是CVflows,安霸没有透露过太多细节,核心就是数据流架构,类似于DSP。数据流架构是一种计算机体系结构,直接与传统的冯·诺依曼架构或控制流体系结构进行对比,数据流架构没有概念上的指令计数器(所以它的算力无法使用TOPS这样的单位,安霸只能说等效于500TOPS)。其使用粗粒度表示(Coarse-grained Representation)来提高数据的并行度,并允许编译器同时调度多个顺序循环和功能,以实现更高的吞吐量及更低的延迟。
现在大部分的GPU、CPU都是基于指令集的架构,应用层可以通过软件和编辑器去将语言最终转化为机器语言,即二进制的码,从而执行指令和操作,并保证对不同应用的兼容性。DSP有个重复循环机制,即进入这种模式时,指令自动变为单周期指令,零存储开销,零译码开销,效率飞速增加。某种意义上等于没有了指令的概念。安霸的CVflows应该就是这种设计。
图片来源:互联网
传统AI加速器靠堆砌MAC数量,数量越多,算力越强,非常简单粗暴,缺点是成本高,效率低。
图片来源:互联网
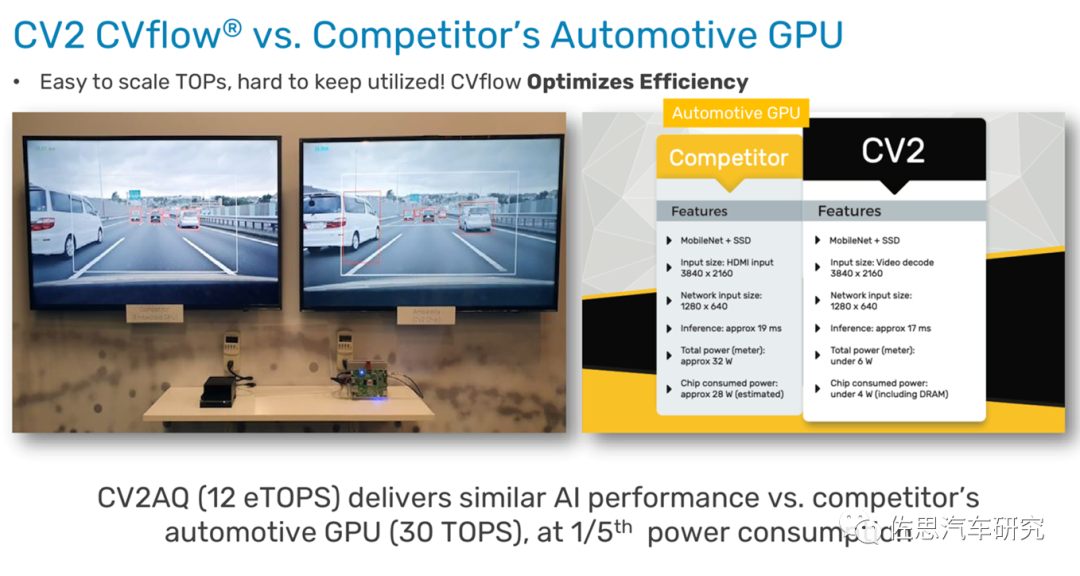
安霸特别拿英伟达的Xavier做了个对比,汽车GPU达到30TOPS算力的只有英伟达的Xavier。安霸的效率是英伟达的5倍。
图片来源:互联网
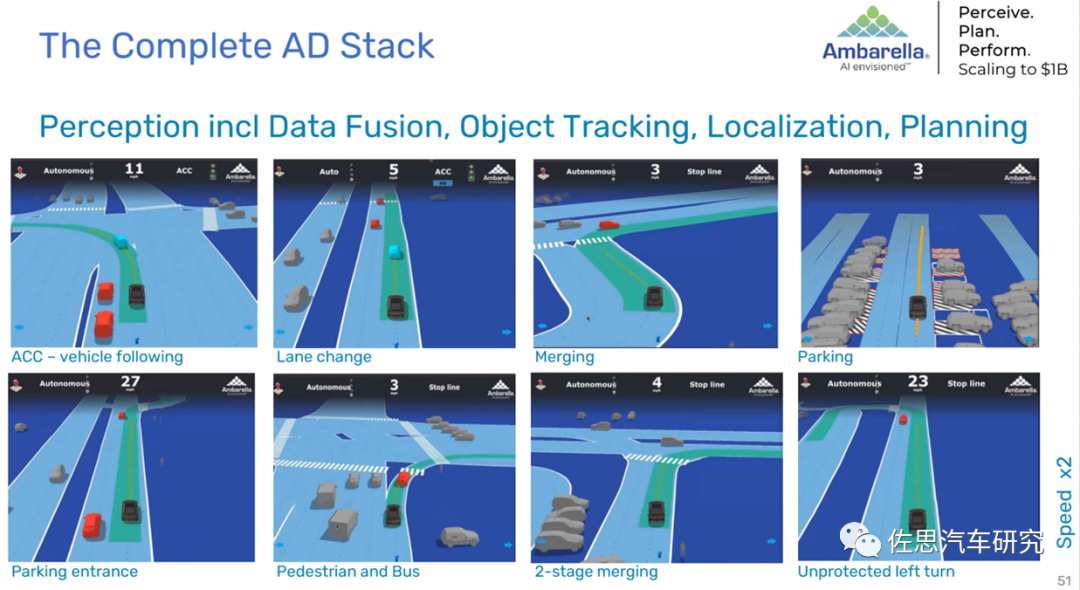
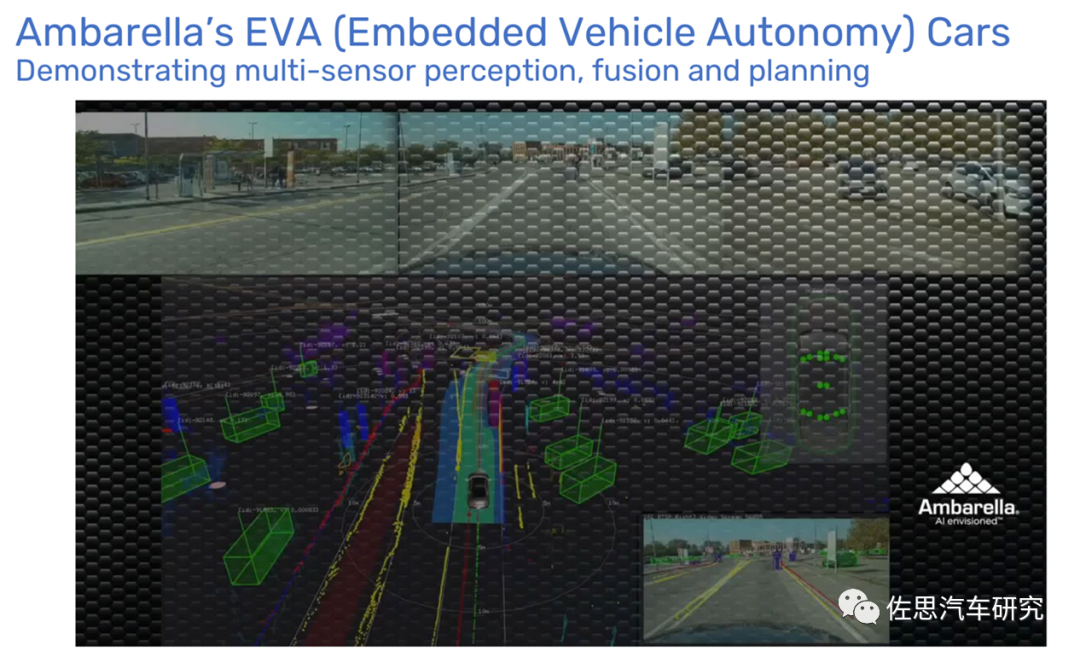
安霸也提供完整的软件协议栈,还精细地分为有HD地图和无HD地图两种模式。
图片来源:互联网
图片来源:互联网
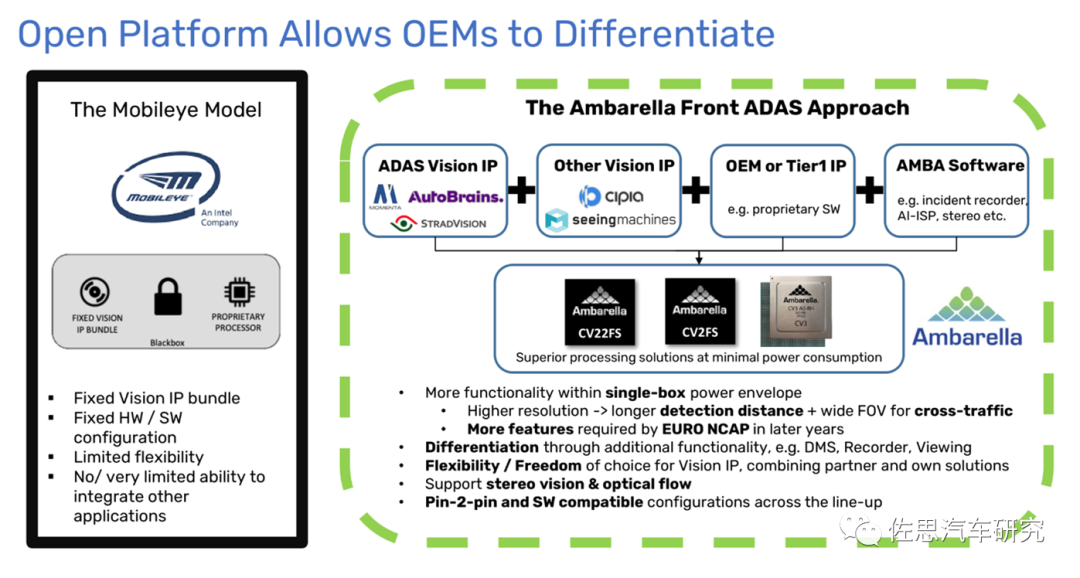
安霸也不会忘记与Mobileye对比,安霸是一个开放的平台。

图片来源:互联网
安霸汽车软件合作伙伴,其中DMS领域的Seeing Machines是澳洲上市公司,其产品大量用于通用汽车上。

图片来源:互联网
更多佐思报告
佐研君:18600021096(同微信)
符先生:15810027571(同微信)
赵先生:18702148304(同微信)
智能网联汽车产业链全景图(2021年12月版)
「佐思研究月报」
ADAS/智能汽车月报 | 汽车座舱电子月报 | 汽车视觉和汽车雷达月报 | 电池、电机、电控月报 | 车载信息系统月报 | 乘用车ACC数据月报 | 前视数据月报 | HUD月报 | AEB月报 | APA数据月报 | LKS数据月报 | 前雷达数据月报