LiDAR 360小课堂 | 激光雷达数据七参数转换
以下文章来源于爱学习的测绘师 ,作者曾滔
分享测绘行业知识,主要为激光雷达,倾斜摄影,测绘基础知识等。

坐标转换,尤其是七参数计算和基于七参数的数据转换,是我们在激光雷达内业处理过程中经常碰到的问题,当然除了七参数转换我们还有四参数和四参数+高程拟合两种,今天就讲述第一种:七参数计算和基于七参数的激光雷达数据转换。
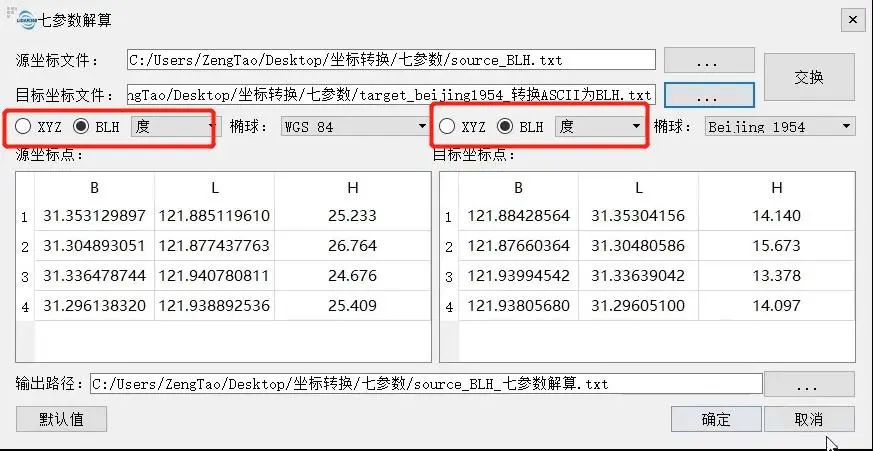
在LiDAR 360版本中(5.2以前),LiDAR 360支持的原始数据格式是经纬度或者空间直角坐标系格式,如下图所示。我们平时测量得到的坐标一般都为经纬度或者高斯平面直角坐标系,因此空间直角坐标系格式的源数据,其意义不大(但是实际上,七参数的解算的原始数据都必须转换到空间直角坐标系才能解算)。
在LiDAR 360最新的5.2版本中,支持了平面投影直角坐标系之间的转换(下图所示)。
一、七参数计算原理
1.1 七参数的计算
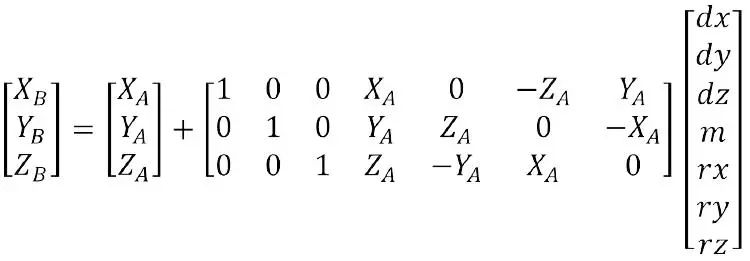
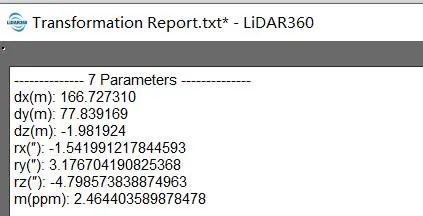
根据输入对应的三个及以上控制点对(标准的应该是6个),利用布尔沙模型解算坐标系之间转换的七参数,即三个平移参数dx(米), dy(米),dz(米),三个旋转参数rx(秒),ry(秒),rz(秒)与一个缩放比例m(ppm),计算公式如下:布尔莎七参数的公式可写为如下的形式。
转换成方程式组,即:
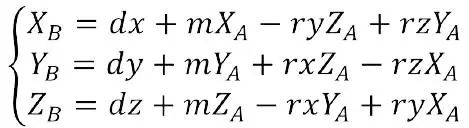
式中有7个未知量,如果有3组已知点,则按照上述形式可以构建9组方程,即可利用最小二乘法求得7个参数的值。
1.2 高斯坐标转空间直角坐标
由于我们平时几乎不用空间直角坐标系,但是我们可以很容易的获得经纬度+大地高(正常高)的形式,只需要使用下公式转换为空间直角坐标系:
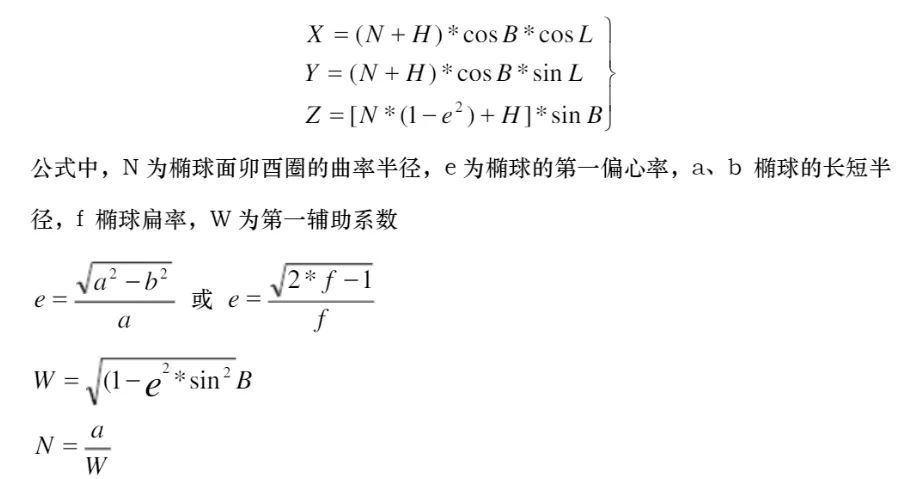
如何把高斯坐标转换成空间之间坐标呢?
在实际应用当中,我们拿到了(x y H)等高斯坐标,H是大地高。首先知道他的投影参数和椭球基准,这样能利用高斯反算(已知平面直角坐标系,计算经纬度B,L)至经纬度,然后利用上述公式计算其空间直角坐标系。
1.3 高程问题
1.3.1 七参数中的高程
如果对高程要求不严格,只是为了得到平面坐标,那么计算七参数时候,高程可以用正常高代替大地高(当然不必使用七参数,可以使用二维四参数或者二维七参数等与高程无关的转换方法)。
如果需要得到精确的正常高,比如:已知重合点为西安80坐标系的高斯坐标系与85正常高(投影参数已知),与2000坐标系的经纬度和大地高。计算2000到西安80的转换参数。这个时候你可以把85正常高当做大地高参与七参数计算,其转换参与,只能适用于小面积,地形起伏不大的地方(假设似大地水准面在小范围内的起伏变化规律符合椭球表面变化规律)。
因此,对于全国范围的坐标转换,平面与高程通常是独立进行转换的。
1.3.2 似大地水准面拟合
这种方式适用于大面积的大地高与正常高的转换。当已知一个城市的似大地水准面时(城市似大地水准面分辨率不低于2.5′×2.5′,精度优于0.05m),我测量得到的大地高可以直接减去高程异常值(由似大地水准面成果得到)到正常高。
1.3.3 高程拟合
通过少量的GPS水准点的高程异常来拟合未知点的高程异常,进而得到正常高。这种方法也被称为卫星定位水准法。这种方法在山区,大面积测区,水准控制点少的情况下,精度不能保证。
1.3.4 高程内插
在大面积或者有地形变化剧烈的地方,单个拟合公式并不能很好的表达高程异常变化,因此LiDAR 360具有高程内插的功能。
高程内插原理是将已知控制点数据构建三角网模型,使用高度系统之间的高程异常值进行局部点插值修正得到正常高。
1.4 独立坐标系
独立坐标系与国家2000坐标系之间的转换,可以采用四参数+高程拟合(内插)方法,或者已知独立坐标投影要素(中央子午线,抵偿高程面,原点平移)下将坐标转换为经纬度,然后转换成2000高斯平面坐标系。
很多时候,不要一拿到三维坐标就去计算七参数,有的时候并不能计算成功。比如独立坐标系的坐标轴指向与目标坐标系统的指向(夹角)相差很大,就不能保证参数结果的正确性(因为七参数的角度只能是小角)。正确的做法就是需要知道独立坐标投影要素。
二、LiDAR 360七参数解算
2.1 数据准备
本文以计算WGS 84经纬度+大地高,转换到国家2000下的高斯投影+85正常高,中央子午线114E的七参数为例子讲解。
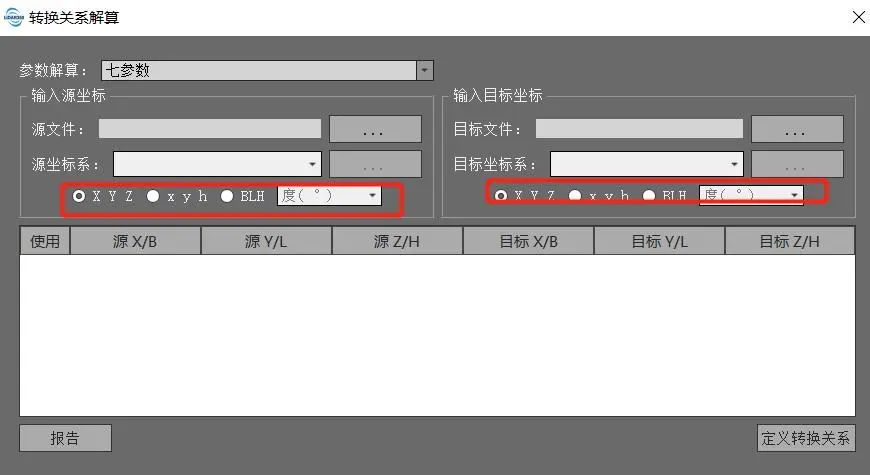
2.2 转换关系解算
分别打开源坐标文件(WGS 84经纬度+大地高,经纬度为度格式)和目标坐标文件(国家2000下的高斯投影+85正常高,中央子午线114E)。注意格式选择正确,经纬度选择BLH,高斯投影+正常高选择xyh。
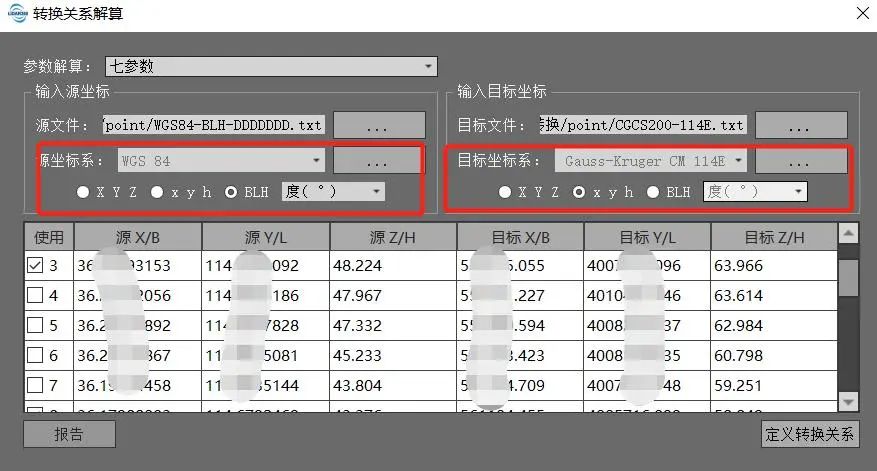
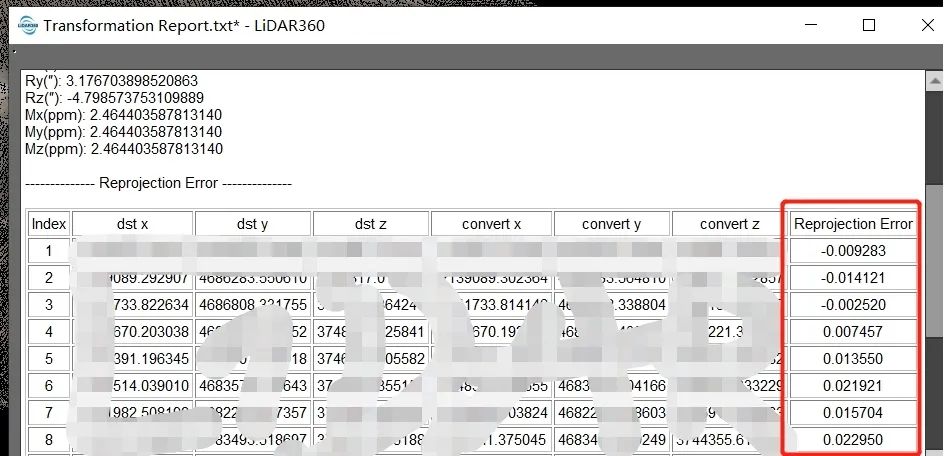
然后点击“报告”,即可得到七参数。
2.3 验证七参数
可通过报告里面的reprojection error对未参与七参数计算的控制点进行一个验证,如果该值小于特定的控制点精度,则七参数是合格的。
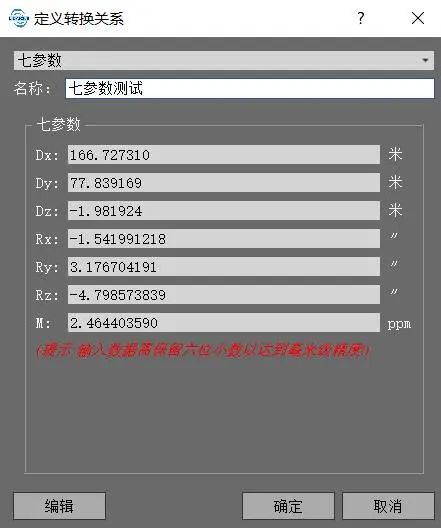
2.4 保存七参数
可以保存七参数,点击“定义转换关系”,输入名称,即可保存。
三、激光雷达数据七参数转换
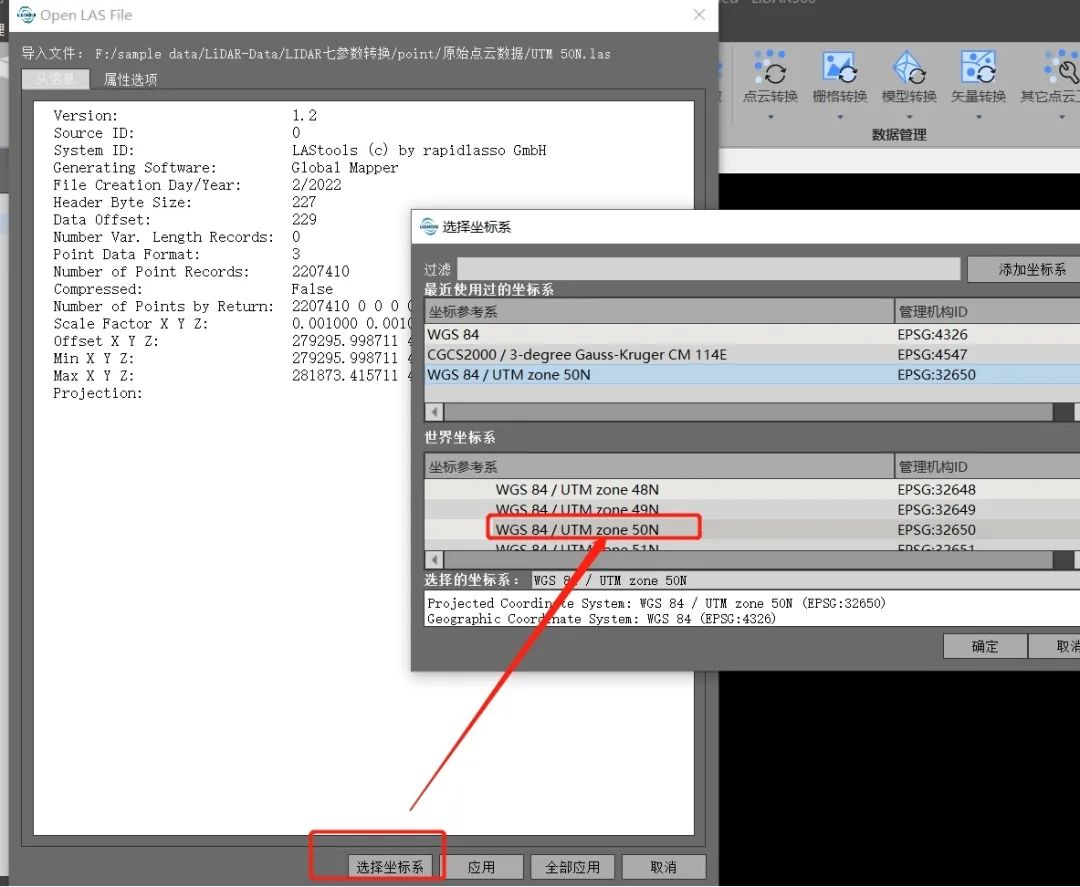
3.1 定义投影
如果原始数据没有投影信息,则可以在导入数据的时候,直接定义其投影系统。
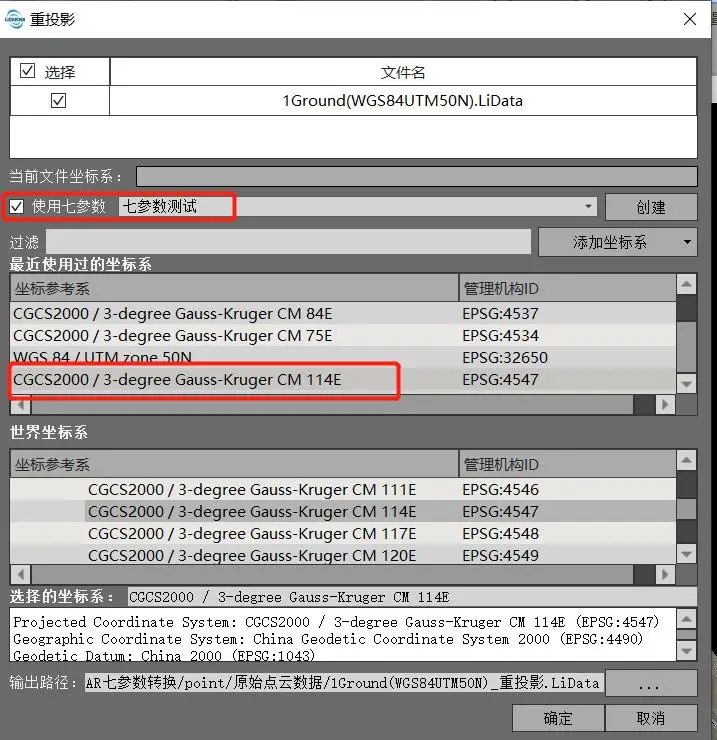
3.2 七参数转换
使用重投影功能对数据进行重投影,以达到对激光雷达数据进行七参数转换的目的。
3.3 如何验证转换后的数据
如有已知坐标的地面靶标或者特征物体,可以量取转换后的坐标与已知坐标比对。

关于LiDAR360
关注" 数字绿土 "公众号
回复" LiDAR360试用 "
最新版LiDAR360软件即刻体验!
北京数字绿土科技股份有限公司,2012年9月成立,总部位于北京市中关村软件园,是一家由海归专家团队创办的高新技术企业,目前已在美国、武汉、深圳、广州、广西、成都等地设立分公司。公司自主研发的硬件系统,如机载、车载、背包等多平台激光雷达扫描设备,以及点云和影像处理软件系统,如LiDAR360激光雷达点云数据处理平台等,被广泛应用于数字城市、智慧电力、地理信息、智慧农林、无人驾驶、高精度地图等专业领域。
数字绿土深受国内外专业客户信赖,产品服务遍及全国并远销美国、澳大利亚、欧洲、日本、新加坡等60多个国家和地区。我们致力于提供专业可靠的激光雷达行业应用解决方案,在深耕主业的同时,我们持续寻求创新与突破,立志成为全球领先的人工智能+地理信息公司。
