科研&教学丨Crazyflie无人机协同控制实验平台

多智能体协同控制
多智能体协同控制是新一代人工智能的重要研究领域,以无人机集群为代表的集群系统具有大规模性、开放性、高动态性及强鲁棒性等典型特征。对此,灵思创奇提供了一套基于室内定位系统的完整四旋翼编队实验解决方案。
本平台的多智能体协同定位采用光学运动捕捉技术,并通过无线通讯网络实现多机、多车间的通信,用户能够将MATLAB/Simulink开发的无人机及无人车编队仿真控制算法直接生成代码下载到无人机及无人车中,在室内环境下进行多机、多车编队算法的验证。
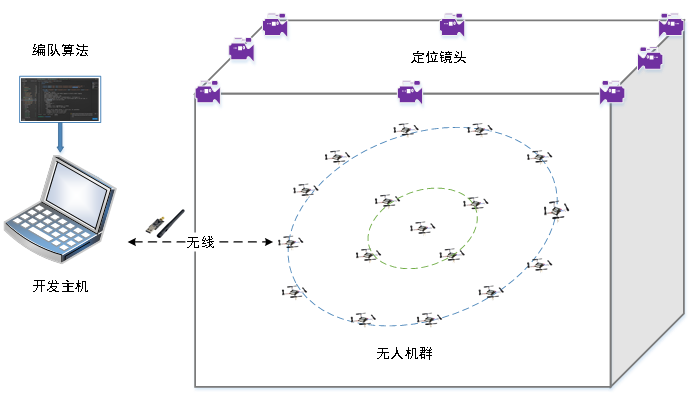
室内定位系统:采用室内光学运动捕捉技术,标配定位范围6m×6m,支持毫米级定位,能够同时捕捉20+架左右的无人机;
被控对象:本平台系统支持20+架Crazyflie进行编队实验(被控对象数目可根据实验室具体情况扩展);
无人机飞控: Crazyflie的控制芯片STM32F405 拥有强大的处理器功能,并可以通过添加扩展板来增强,这为 Crazyflie 提供了额外的传感、定位或可视化功能可以进行扩展实验、改进和添加新功能。
基础开发平台:平台以Python作为主要开发语言,可进行多无人机轨迹规划设计,通过无线电或蓝牙下载到无人机控制芯片;
运动展示:Crazyflie配有闪烁LED灯,在展示飞行状态的同时可提升编队飞行的展示效果。
扩展开发语言:系统支持Python、C#、C/C++、JavaScript、Node.JS、Cylon.JS 或 Java,适合有一定代码开发能力的学生,进一步锤炼代码编程能力;

数字仿真实验(四旋翼单机、多机数字仿真、任务规划、飞行视景等);
实物飞行实验(四旋翼单机、多机控制实验、任务规划、协同控制等);
定位系统实验(镜头标定、刚体搭建、目标获取、多机数据融合等);
陆空协同控制测试实验(多车、多机协同编队运行实验);
Crazyflie编队扩展实验(飞机组装、Ubuntu环境搭建、Python程序Demo演示)。
编队队形的设计:多个无人机在指令下运行至指定的位置,并最终实现既定的编队形态,除了需要考虑无人机气动力影响之外,还要考虑任务要求及无人机间信息交换的冗余度,同时保证无人机之间不会发生碰撞。
编队队形的保持:在无人机执行指令过程中能克服来自系统内部或者外在环境干扰,进而保持整个队形不变。
编队队形的变换:在无人机行进过程中能够适应来自系统内部或外在环境干扰而对编队做出适当且合理的改变。
Crazyflie无人机协同控制实验平台基于模型设计思路,涉及无人机数字仿真建模以及室内定位系统、飞行器导航与运动控制系统、任务规划系统的设计与搭建,为《视觉定位原理》《无人机飞行控制技术》、《无人机飞行控制原理》《编队设计技术》《Python程序设计》等课程的实践教学提供了有力支撑。



相关产品


相关阅读

北京灵思创奇科技有限公司
电话:010-5732 5131
传真:010-5732 5130
网址:www.linkstech.com.cn
微信公众号:LINKS-TECH
地址:北京市昌平区北控宏创科技园17号楼